

I. 서론
1. 연구배경 및 목적
II. 동향
1. 촉지도
2. 촉지도 자동화 연구 동향
III. 촉지도 제작 자동화 기술 개발
1. 연구내용 및 방법
2. 피난평면도 자동추출
3. YOLOv10 기반 피난시설 탐지
4. OpenCV 기반 건물 외곽선 추출
5. 피난안내 촉지도 도면 생성
6. 피난안내 촉지도 시범 인쇄
IV. 결론
I. 서론
1. 연구배경 및 목적
현대 사회에서 재난 및 화재 등 비상 상황은 언제든 발생할 수 있으며, 이에 대비한 피난 안내 정보는 모든 시민의 생명과 안전을 보장하기 위한 필수 요소이다. 이러한 일환으로 소방청은 표준 피난안내도를 소방안전관리대상물 및 다중이용업소 등에 설치하도록 하고 있다.
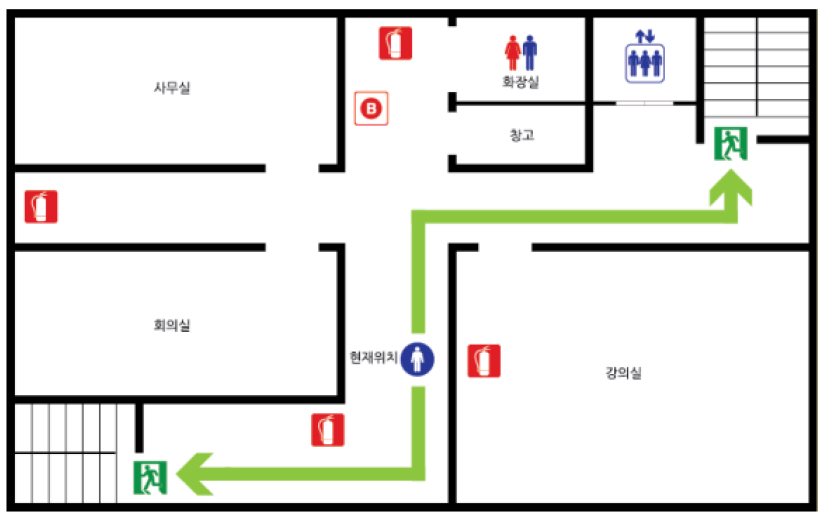
그림 1의 피난안내도는 소방청「표준 피난안내도 작성기준」규정에 맞게 제작된 도면으로 건물 내 사용자에게 피난에 필요한 요소를 설명하고 피난동선을 파악할 수 있도록 안내해 주는 그림이다. 화재 시 피난 요령 및 소화기 사용요령, 피난평면도, 피난동선, 현재 위치, 비상구, 소화기, 엘리베이터, 발신기, 화장실 등의 위치 정보와 내부 건물 이름 등이 표기되어 있다.

그러나 현재 피난안내도는 시각적 정보에 의존하고 있어, 시각장애인은 재난 발생 시 피난 경로를 인식하거나 이동하는 데 심각한 제약을 받는다. 이러한 정보 접근성의 한계는 시각장애인의 자율적 대피를 어렵게 하며, 결과적으로 안전권의 불평 등을 초래한다(University of California, Merced, n.d.; Lin et al., 2023).
이러한 문제를 완화하기 위해 일부 공공시설에서는 촉지도 형태의 시각장애인을 위한 점자 안내판을 설치하고 있으나, 피난 관련 시설이 빠져있어 시각장애인의 대피에 필요한 사전 정보를 얻는 데 어려움이 있다. 그리고 촉지도가 설치되어 있어도 실제로 사고 발생 당시에 설치되어 있는 곳으로 가서 공간 구조를 파악하고 대피하기엔 시간이 부족해 사용자가 직접 가지고 있지 않으면 설치형 촉지도의 활용도는 떨어질 수밖에 없다(서동구 등, 2021; 조경숙 등, 2021). 또한, 기존 촉지도는 여러 구조적 한계를 지닌다.
보건복지부 2023년 장애인 편의시설 설치현황조사(보건복지부, 2023)에 따르면, 촉지도는 보통 건물 입구에 있는 스탠드형 촉지도나 건물 내부에 있는 벽부형 촉지도가 설치되어 있다. 하지만 스탠드형 촉지도는 대부분 건물 주출입구 부근에 하나 있는 게 전부이며, 벽부형 촉지도는 없는 경우도 있다. 촉지도가 있다고 해도 바닥면으로부터 1.0m~1.2m에 설치 권고하고 있어 청소년이나 키가 작은 시각장애인은 스탠드형 촉지도에 손이 닿지 않아 사용하기 어렵다. 스탠드형은 접근성 이외에도 제작에 들어가는 시간・비용이 많이 요구되기에 그만큼 활용하기 쉽지 않다(박재국 등, 2023).
또한, 현재의 촉지도는 접근성 및 활용도뿐만 아니라 제작 방식에도 한계가 있다. 현재 고정형 점자 안내판을 설치하기 위해선 고가의 비용 및 3일이라는 제작 기간이 소요된다. 이러한 이유로 실내 구조 변경이 있다면, 그에 맞춰 점자 안내판을 다시 수정 후 제작해야 하기에 갱신 비용과 시간이 많이 소요된다(박재국 등, 2023).
점자 안내판은 사용자가 계속 손으로 만지는 제품인 만큼 청결유지 및 유지보수를 지속적으로 해줘야 하기에 재정적인 부분의 문제도 존재한다(안재성 등, 2017). 그리고 현재의 작업 방식이 이미지 스캔부터 도면 내부 촉지기호를 직접 손으로 배치(placement)하고 그래픽 요소를 수동으로 수정해야 하며, 이 과정에서 유료 CAD/도면 프로그램이 필요하다. 이러한 유료 프로그램은 비용 부담도 크지만, 여러 선행 연구는 고급 CAD 시스템이 일반 사용자에게는 높은 학습 비용과 복잡성 때문에 접근 장벽이 된다고 보고한 바 있다(Brittell et al., 2018; Wabiński et al., 2022).
이와 같이 시각장애인이 사용하는 촉지도는 시각장애인에게 지리정보를 제공하고 이동에 필요한 보조 도구로 활용되고 있지만, 접근성, 제작 비용, 제작 시간 등의 문제로 활용도가 낮다는 한계가 있다(안재성 등, 2017; 박재국 등, 2023).
따라서 아래의 다음과 같은 문제를 해결하기 위해 본 연구에서는 기존의 일반인을 대상으로 하는 피난안내도를 사용자가 직접 휴대하며 언제든 활용할 수 있는 시각장애인용 휴대형 피난안내 촉지도를 자동 제작하는 자동화 기술을 개발하고자 한다.
① 시각장애인을 위한 피난안내 촉지도가 거의 없음
② 촉지도 제작 과정이 수작업에 의존함에 따라 제작 비용이 많이 들고 제작 기간이 오래 소요됨
③ 일부 시범 제작된 피난안내 촉지도의 경우 건물 구조나 피난 경로가 변경될 경우 수정 및 갱신이 어려운 고정형 구조로 인해 최신 정보를 반영하기 어려움
④ 촉지도의 설치 위치가 제한적이어서 실제 재난 상황에서 시각장애인이 즉시 접근・활용하기 어려움
즉, 피난안내 촉지도 자동제작 기술개발을 통해서 고정형 촉지도의 한계를 넘어, 누구나 손쉽게 안내도를 확보할 수 있고 실내 구조 변경이나 갱신・유지보수에서도 유연하게 대처할 방안을 제시하고자 한다.
특히, 본 연구는 기존 촉지도 제작 자동화 기술과 공개된 다양한 방식의 제약점을 면밀히 분석한 뒤, 보다 효율적이고 보편화가 가능한 새로운 자동화 처리 기법을 구축하는 데 중점을 두었다.
구체적으로, 피난안내도를 업로드하면 피난평면도 자동추출, 피난 관련 시설 자동 객체 탐지, 건물 외곽선 자동추출, 촉지기호 자동배치, 촉지도 인쇄를 위한 이미지 최적화 등까지 일련의 과정을 자동 수행할 수 있도록 설계하였다. 이로써 사용자는 추가 수작업 없이 피난안내도 이미지만 준비하면 자동으로 피난안내 촉지도 형태로 변환된 결과물을 신속하게 무료로 얻을 수 있다.
II. 동향
1. 촉지도
시각장애인이 촉각으로 지형지물을 인지할 수 있도록 지도의 형태를 양각과 음각으로 나타낸 것을 촉지도라 하며(안재성 등, 2017), 시각장애인은 건물 내부에서 이동 시에 흰 지팡이 또는 건물 내・외부에 있는 촉지도와 같은 시각장애인 보조 도구에 의존하여 이동한다(이예린 등, 2020).
촉지도에는 사용 목적과 유형에 따라서 점자 안내판, 점자지도, 피난안내 촉지도(피난촉지도) 등이 있다.
그림 2의점자 안내판은 촉지안내도, 점자안내문구, 직원호출버튼 및 음성안내장치 등이 포함된 시설로 건물의 주출입구 인근에 설치하여 시각장애인의 접근과 시설이용을 돕는 안내시설이다(한국시각장애인연합회, 2017). 촉지안내도는 점자 안내판에 포함되어 건물 실내 공간 및 편의시설의 위치정보를 돌출된 선과 면, 촉지기호, 점자 등으로 간략하게 표시하여 시각장애인에게 공간 정보를 촉각으로 알려 주는 안내도이다(한국시각장애인연합회, 2017). 설치 위치와 이동 방식에 따라 크게 벽부형, 스탠드형, 휴대형으로 구분된다.

벽부형은 공공기관, 지하철역, 관공서 등 건물 출입구에 고정 설치되는 유형으로, 내구성과 접근성이 우수하지만, 설치 비용과 갱신 주기의 한계가 있다(박재국 등, 2023; Wabiński et al., 2022). 스탠드형은 사용자가 접근하기 용이한 높이로 설치되어 접근성이 비교적 높으나, 공간 제약이 크고 유지관리가 어렵다는 단점이 있다(박재국 등, 2023).
반면 휴대형은 사용자가 직접 휴대하여 공간을 탐색할 수 있도록 설계된 형태로, 기존 고정형 촉지도의 공간적 제약을 극복하기 위한 대안으로 주목받고 있다(박재국 등, 2023).
박재국 등(2023)은 실내 공간을 대상으로 한 휴대형 촉지도 시제품을 제작하고, 재질・출력 방식・가독성 측면에서의 효용성을 비교하여 휴대형 촉지도의 실용 가능성을 검증하였다(박재국 등, 2023). 연구 결과, 휴대형 촉지도는 사용자 접근성과 정보 인지 효율 측면에서 고정형 대비 우수한 결과를 보였으나, 수작업 중심의 제작 과정이 효율성 확보의 한계로 지적되었다. 이러한 배경에서 최근에는 촉지도 및 점자 안내판의 자동 제작(Auto-generation) 기술이 새로운 연구 방향으로 부상하고 있다(박재국 등, 2023).
그림 3의 점자지도는 넓은 의미의 촉지도로 볼 수 있으며, 건물 안내를 대상으로 하는 시각장애인용 점자 안내판과 구분된다. 점자지도는 지형도의 주요 지형, 지물 및 지리정보를 양각, 음각으로 점자 및 촉지기호 등을 활용하여 만든 지도이다(국토지리정보원, 2022).
피난안내 촉지도 또는 피난촉지도는 피난 관련 시설과 피난이동경로 등을 담은 촉지도로 시각장애인의 특성을 고려한 피안안내도 또는 피난 경로 지도이다(오충원 등, 2017).
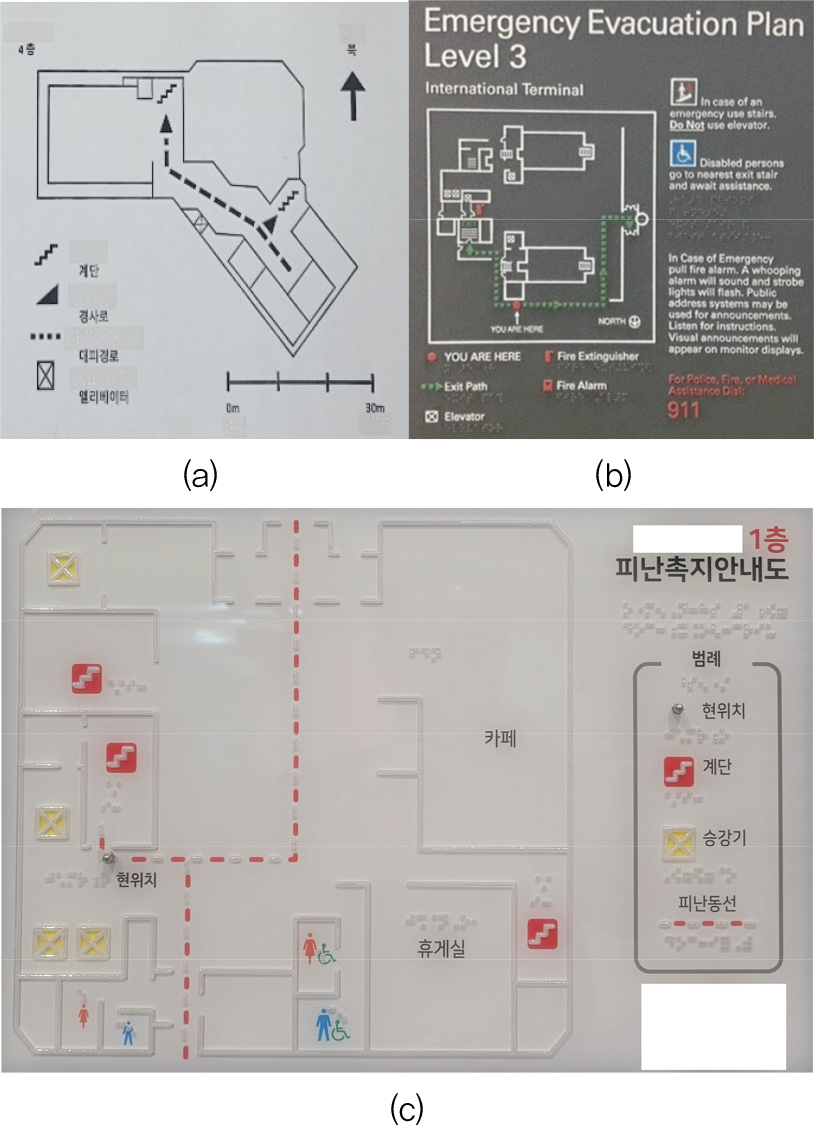
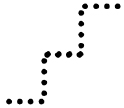
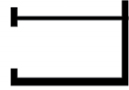
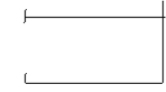
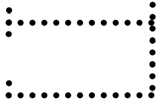
그림 4의 (a)는 도면 이미지에 촉지기호(계단, 경사로, 피난 경로, 엘리베이터)를 추가하고 특수용지에 출력한 이후 열전사프린터에 통과시켜 수작업으로 제작된 휴대형 피난안내 촉지도이다(박재국 등, 2023). 그리고 (b)는 센프린시스코 국제공항에서의 탈출 경로를 나타낸 벽부형 피난안내 촉지도 사례이며(오충원 등, 2017), (c)는 폴리카보네이트(PC) 재질로 주문 제작된 벽부형 피난안내 촉지도(또는 피난촉지안내도)를 나타낸 것이다.
2. 촉지도 자동화 연구 동향
기존의 점자 안내판 제작 과정은 대부분 전문가의 수작업에 의존하고 있다. 디자이너나 점역사가 피난안내도 혹은 평면도를 해석하여 점자 및 촉각 요소를 수동으로 배치해야 하며, 제작에 최소 3일 이상의 기간이 소요된다(안재성 등, 2017). 또한, 건축물의 구조가 변경될 경우 동일한 절차를 반복해야 하므로 유지보수 효율성이 낮고, 제작 비용 역시 큰 부담으로 작용하고 있다(박재국 등, 2023). 이러한 문제로 인해 소규모 시설이나 공공기관에서는 점자 안내판의 설치율이 여전히 낮은 수준에 머물러 있으며, 이에 따라 점자 안내판의 자동화 제작 및 디지털 전환에 대한 연구 필요성이 꾸준히 제기되어 왔다(안재성 등, 2017).
최근 연구에서는 점자 안내판의 자동화와 다양화된 형태에 대한 시도가 이루어지고 있다. 한 연구에서는 시각장애인의 이동 접근성을 높이기 위해 휴대형 실내 촉지도(prototype portable tactile map)를 제작하고, 인쇄형 촉지도의 인식과 사용자 만족도를 비교・분석하였다(박재국 등, 2023). 해당 연구는 점자 안내판의 물리적 형태를 다양화하고 사용자 중심의 접근성을 제시하였으나, 도면 인식 및 점자 촉지기호 배치 과정은 여전히 수작업에 의존하는 한계를 보였다.
피난안내도와 같은 실내 도면을 자동으로 처리하려는 연구도 점차 활발해지고 있다. 피난안내도 이미지를 기반으로 벽체와 피난 경로선을 자동 검출하여 공간 구조를 모델링하고, 이를 시맨틱 데이터로 변환하는 방법론이 제시되었다(김미선 등, 2025). 이러한 연구는 기존 도면을 활용한 실내 공간정보 구축의 기초를 마련했다는 점에서 의의가 있으나, 점자 안내판 제작으로의 확장이나 시각장애인용 촉지 정보 제공까지는 다루지 않았다.
한편, 지도나 평면도를 점자 안내판으로 변환하는 자동화 연구도 일부 진행되었다. 컴퓨터 비전 기술을 활용하여 일반 종이 지도를 디지털 영상처리를 통해 점자 패턴으로 변환하는 연구에서는 윤곽선 검출과 형태학적 연산을 적용해 지도 구조를 단순화하고 점자 인쇄에 적합한 형상을 추출하는 방식을 제안하였다(Lee and Cho, 2022). 그러나 이러한 연구들은 일반 지도나 단순 구조물 도면을 대상으로 하며, 피난안내도와 같이 피난시설(비상구, 소화기, 엘리베이터 등) 정보가 포함된 특수 도면을 자동으로 점자 안내판으로 변환하는 연구는 존재하지 않는다. 즉, 기존 연구들은 지도나 공간정보의 점자화에 초점을 맞췄을 뿐, 피난안내도의 상징적 객체를 자동 탐지하고 점자 촉지기호로 변환하는 통합적 체계는 아직 제시되지 않았다.
시각장애인의 피난 안전 확보를 위한 연구도 다수 수행되어 왔다. 재난 대응 욕구 분석 연구에서는 시각・청각・촉각 정보가 통합된 피난 안내 시스템의 필요성이 강조되었으며, 시각장애인은 대피할 수 있는 안전한 위치를 모르기에 스스로 이동할 수 없다(윤기봉 등, 2020). 다른 연구에서는 국내 Barrier-Free 제도 및 대응 매뉴얼의 개선을 통해 시각장애인의 피난 안전을 보장하기 위해 촉각 정보의 표준화가 필요하다고 제안하였다(서동구 등, 2021). 이러한 연구들은 점자 안내판이 단순한 정보 전달 수단을 넘어, 재난 대응을 위한 실질적인 피난 유도 장치로 발전해야 함을 시사한다.
또한, 청각과 촉각을 결합한 시각장애인 피난 유도 시스템 개발 연구에서는 진동 및 음성 신호를 활용하여 비상 상황에서도 안전하게 대피할 수 있는 기술적 방법론이 제시되었다(한국건설기술연구원, 2020). 이러한 연구 흐름은 향후 점자 안내도의 자동화 기술이 웹 기반 점자 지도 제작, 실시간 점자 출력, 스마트 피난 유도 시스템 등으로 확장될 가능성을 보여준다.
결국, 기존 연구들은 점자 안내판의 필요성과 디지털화 가능성을 확인했으나, 피난안내도 이미지를 입력받아 피난평면도 추출 → 피난시설 객체 탐지 → 건물 외곽선 추출 → 촉지기호 배치 → 피난안내 촉지도 생성의 전 과정을 자동으로 수행하는 완전 자동화 연구는 존재하지 않는다. 본 연구는 이러한 한계를 해결하고자, YOLOv10 객체 탐지 알고리즘과 OpenCV 기반 영상처리 기법을 결합하여 피난안내도를 피난안내 촉지도로 자동 변환하는 자동화 기술을 제안한다.
III. 촉지도 제작 자동화 기술 개발
1. 연구내용 및 방법
본 연구서는 인공지능 기반 영상 분석 기술과 영상처리 기법을 결합하여 피난안내 촉지도 제작을 자동화하고자 한다. 구체적인 연구내용과 방법은 다음과 같다.
첫째, OpenCV 기반 영상처리 기법을 이용하여 입력된 피난안내도에서 촉지도 제작에 필요한 피난평면도를 자동으로 추출한다.
둘째, 최신 객체 인식 기술인 YOLOv10 알고리즘을 활용하여, 입력된 피난평면도에서 건물 도면 내의 주요 피난 관련 시설(비상구, 소화기, 엘리베이터)을 자동으로 탐지하고, 위치 정보를 획득한다.
셋째, OpenCV 기반 영상처리 기법을 이용하여 건물의 외벽과 내벽을 인식하고, 외곽선 정보를 자동으로 추출하며, 이때 촉지도 제작에 불필요 한 정보 제거 및 일반화를 자동으로 수행한다.
넷째, YOLOv10을 통해 탐지된 피난시설 정보와 추출된 건물 외곽선 데이터를 중첩・통합하여, 피난안내 촉지도용 도면을 생성한다. 이때 피난시설 정보는 사전에 정의된 촉지기호로 자동배치된다.
다섯째. 생성된 피난안내 촉지도용 도면을 점자프린터로 인쇄할 수 있도록 도면을 최적화함으로써 자동화된 피난안내 촉지도 제작 기술의 제시하고자 한다. 그림 5는 피난안내 촉지도 자동제작 과정을 그림으로 나타낸 것이다.
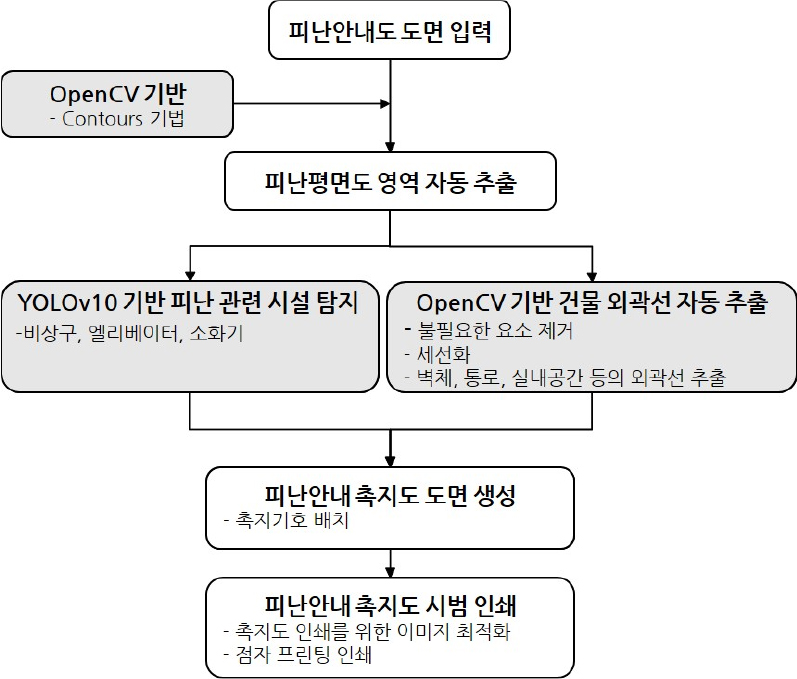
표 1은 피난안내도의 건물 내부를 나타낸 피난평면도에 표현된 기호이며, 이를 피난안내 촉지도의 촉지기호로 나타낸 것이다. 그림에서는 UV와 열전사프린터로 출력하는 촉지기호와 본 연구의 점자프린터로 출력하는 천공방식의 촉지기호를 표현한 것이다.










피난안내도의 현재 위치와 피난동선이 피난안내 촉지도에서 제외된 것은 벽면 부착형 안내도가 아닌 휴대형 피난안내 촉지도를 대상으로 설계되었기 때문이다.
즉, 고정형 안내도의 경우 사용자의 고정 위치를 기준으로 피난 방향을 안내하기 때문에 현재 위치 표시가 필요하다. 하지만 휴대형의 경우 사용자가 이동하면서 지도를 참조하므로 특정 지점을 현재 위치로 고정하는 것은 오히려 혼란이 발생할 수 있다.
또한, 피난 관련 시설 탐지 시 피난 객체의 종류를 과도하게 확장할 경우 클래스 간 시각적 유사성으로 인한 과적합(overfitting)이 발생하여 탐지 정확도가 저하되는 현상을 확인하였다. 때문에 객체 탐지 단계에서 YOLOv10 기반 탐지 모델의 학습 효율성과 일반화 성능을 유지하기 위해서 현재 위치 및 피난동선을 제외하였다.
2. 피난평면도 자동추출
1) 피난안내도 도면 입력
사용자는 자동화 과정을 거치기 전에 피난안내도에서 피난평면도만을 추출하기 위해 jpg, png, bmp 등 다양한 파일 포맷의 피난안내도 이미지를 입력할 수 있도록 처리하여 접근성과 효율성을 높였다.
2) 피난평면도 추출
피난안내도에서 피난평면도 자동추출 과정은 OpenCV Contours 기법을 적용하여 추출하였다.
Contours 기법을 기반으로 피난평면도를 추출하기 위해서는 전처리 과정이 필요하다. 첫 번째로 입력 이미지를 그레이스케일로 변환하는 것이다. 그레이스케일은 도면 추출 자동화 처리 속도 및 효율성을 높이기 위해 사용된다. 피난안내도는 다양한 색상 정보를 가지고 있기에 이를 그레이스케일로 밝기 정보만 갖도록 변환한다. 이렇게 색상 정보만 갖도록 변환하면 윤곽선 검출, 이진화, 노이즈(Noise) 제거와 같은 핵심 기능에서 정확하게 작동할 수 있다. 그레이스케일 변환 식은 다음과 같다.
두 번째로 그레이스케일 변환된 이미지에서 이진화(otsu)를 하는 것이다. 이진화는 입력 이미지를 흑백(0 또는 255) 픽셀로 구분하는 전처리 기법이다. 여러 색상 정보를 가지고 있는 밝은 배경, 어두운 선 기준으로 이진화(otsu)하여 배경과 도면을 분리한다. 이렇게 도면을 배경과 색상 정보를 기준으로 분리함으로써, 전처리를 적용하지 않은 기존 Contours 방식보다 정밀하고 안정적인 도면 추출이 가능하다. 여기서 임계값(threshold) 200을 기준으로, 200보다 밝은 영역은 255 (white), 200 이하의 어두운 영역은 0(Black)로 처리한다.
세 번째로 이진화 처리 과정에서 생긴 도면 이미지의 노이즈 및 구멍을 제거하기 위해 닫힘(morphological closing) 연산으로 작은 노이즈를 제거하는 것이다. 객체 경계를 확장하여 작은 구멍을 채우는 팽창(dilation)과 원래 크기로 수축하는 침식(erosion) 연산을 사용하였다. 커널(kernel)의 크기는 5×5 크기를 사용하여 충분한 영역을 처리할 수 있도록 했다. 이를 통해 이진화로 분리되는 과정에서 생기는 미세한 노이즈 및 구멍을 없애 추후에 사용할 윤곽선 추출(Contours)의 성공률을 높이기 위한 전처리를 진행했다.
전처리가 된 도면을 Contours 기법을 이용해 피난평면도를 추출하였다. 이때 가장 큰 면적이 전체 이미지의 10% 이상일 경우, 이를 도면 영역으로 인식하여 추출하고 흰색 배경으로 크롭하여 도면 외곽을 기준으로 추출하였다.
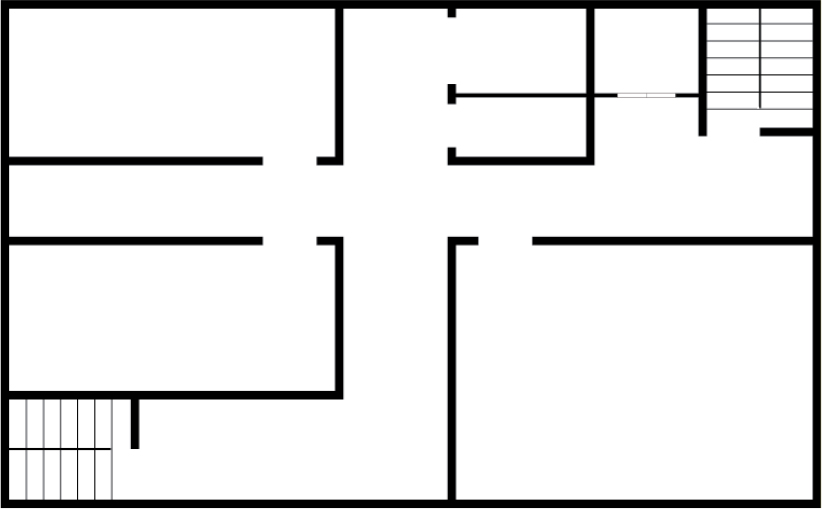
한편, 자동추출 실패 혹은 사용자가 직접 추출을 원한다면 수동 추출 기능을 이용한 마우스 기반으로 추출 가능하도록 구현하였다. 이는 복잡한 도면이나 피난안내도 규정에 의거하여 제작되지 않은 사설 도면에도 대응하기 위함이다. 그림 6은 Contours 기법을 사용하여 자동추출한 피난평면도 결과 이미지이다.
3. YOLOv10 기반 피난시설 탐지
1) YOLO 모델 선정
객체 탐지는 피난평면도 내부에 있는 비상구, 소화기, 엘리베이터와 같은 피난 관련 시설을 탐지하고 그 위치를 저장한 후 피난 관련 시설에 위치에 맞게 촉지기호를 배치하기 위한 전 단계 처리 과정이다.
객체 탐지는 초기에 YOLOv8과 YOLOv10 두 가지 모델을 동일한 조건으로 비교하여, 성능을 평가하고 본 연구에 적합한 객체 탐지 기법을 선정하였다.
그림 7은 YOLOv8의 초기학습 결과, 그림 8은 YOLOv10의 초기학습 결과이다.
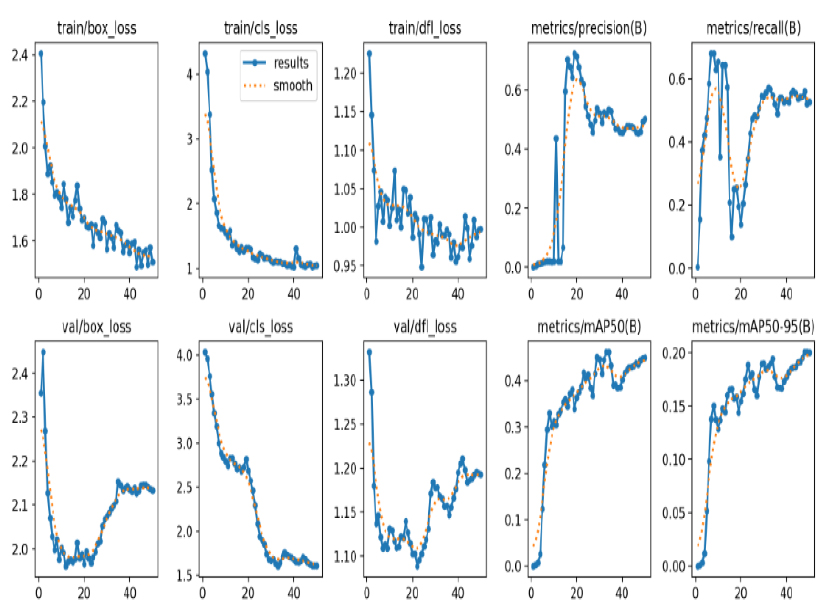
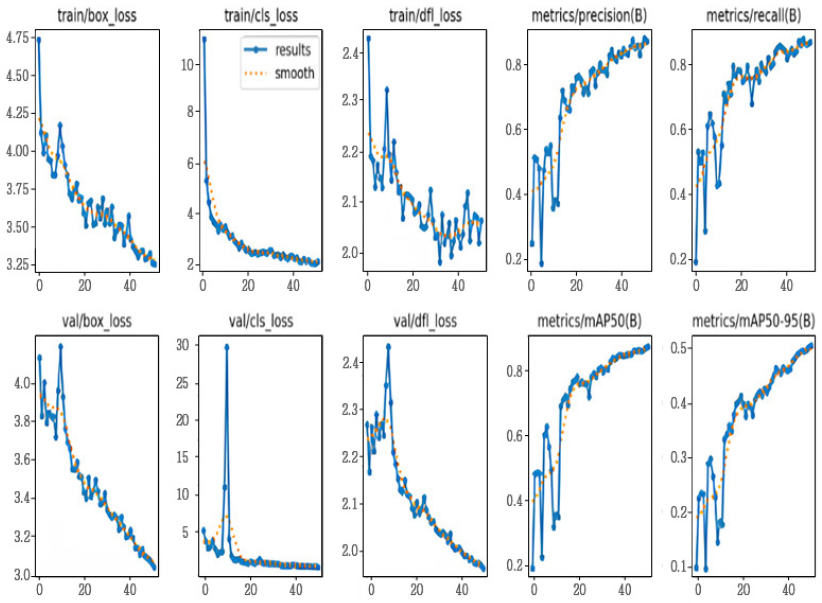
표 2와 표 3은 YOLOv8과 YOLOv10의 비교를 위해 초기 학습한 결과이다. 해당 부분에선 초기에 빠르게 비교하기 위해 엘리베이터 기호는 제외하고 학습하여 비교하였다. 두 모델의 학습 손실(loss) 곡선을 비교한 결과 YOLOv8의 경우 학습 초반 box loss 및 clsassification loss가 불안정하게 진동하는 경향을 보였다. validation 단계에서는 오버슈팅(overshooting)을 발견하였다.
표 2.
YOLOv8 성능 표
| 항목 | Images | Instances | Box(P) | R | mAP50 |
mAP (50-95) |
| 모든 | 112 | 955 | 0.684 | 0.633 | 0.691 | 0.328 |
| 소화기 | 93 | 560 | 0.636 | 0.437 | 0.548 | 0.232 |
| 비상구 | 108 | 395 | 0.731 | 0.828 | 0.834 | 0.425 |
표 3.
YOLOv10 성능 표
| 항목 | Images | Instances | Box(P) | R | mAP50 |
mAP (50-95) |
| 모든 | 112 | 955 | 0.846 | 0.866 | 0.901 | 0.498 |
| 소화기 | 93 | 560 | 0.812 | 0.817 | 0.864 | 0.437 |
| 비상구 | 108 | 395 | 0.879 | 0.914 | 0.938 | 0.56 |
이에 반면 YOLOv10은 학습 10 epoch 이후부터 모든 손실 항목인 box, cls, dfl loss이 감소했고, 정밀도(precison) 및 재현율(recall) 지표에서도 빠른 수렴을 나타냈다. 또한, YOLOv10은 작은 객체 등의 경계박스(regression) 정밀도가 높게 나타나기에 피난안내도와 같이 작은 피난시설(비상구, 소화기, 엘리베이터) 기호를 탐지할 때 적합하다. 이에 본 연구에서는 YOLOv10을 객체 탐지 모델로 채택하였다.
2) 피난시설 탐지
모델 학습 및 후처리는 사전 학습된 가중치를 불러와 전이학습(Transfer Learning) 방식으로 학습을 수행하였다. 학습 데이터셋은 총 285장의 피난안내도 이미지로 구성했으며, 각 데이터에서 비상구, 소화기, 엘리베이터, 발전기 등의 객체가 포함되어 있다. 하지만 학습 과정에서 클래스 수가 증가할수록 비슷한 객체 간의 오인이 발생하고 탐지 정확도가 저하되는 현상이 발생하였다. 이로 인해 촉지기호 배치에도 문제가 발생한다. 이러한 혼동을 방지하기 위해서 피난안내도에서 필수로 사용되고 중요하다고 여겨지는 필수 객체인 3개의 클래스(비상구, 소화기, 엘리베이터)만 최종 탐지 대상으로 선정하였다.
모델 학습은 적은 학습 데이터를 보완하기 위해 데이터 증강(Data Augmentation) 기법을 적용했다. 해당 기법에선 수평 반전, 회전 변환(Random Rotation), 밝기 및 대비 조절 기법을 병행하여 성능을 향상했다. 학습 후 검증 단계에서 Test Time Augmentation(TTA)을 적용하고 세부 튜닝하여 보수성 확보에 중점을 두었다.
YOLOv10 모델의 학습 결과, 표 4에서 평균 정밀도 mAP@0.5(Mean Average Precision at IoU 0.5)는 89.8%로 측정되었으며, 클래스별 성능은 소화기 92.8%, 비상구 89.7%, 엘리베이터 86.9%로 나타났다.
표 4.
YOLOv10 학습 결과
| 항목 | Images | Instances | Box(P) | R | mAP50 |
mAP (50-95) |
| 모든 | 35 | 390 | 0.915 | 0.867 | 0.898 | 0.626 |
| 소화기 | 34 | 253 | 0.909 | 0.909 | 0.928 | 0.606 |
| 비상구 | 35 | 102 | 0.838 | 0.892 | 0.897 | 0.632 |
|
엘리 베이터 | 24 | 35 | 0.999 | 0.8 | 0.869 | 0.639 |
이외에도 NMS(Non-Maximum Suppression) 후처리를 통해 중복 탐지를 제거하고, 탐지된 객체 중 confidence score가 0.25 이하인 항목은 모두 제외하여 오검출을 최소화하였다.
학습 완료 후 탐지된 결과는 바운딩 박스 좌표(x1, y1, x2, y2), 클래스 ID, 신뢰도(confidence)로 구성된 .txt 파일로 저장된다.
4. OpenCV 기반 건물 외곽선 추출
1) 불필요 요소 제거 과정
추출된 피난평면도에는 피난 경로, 텍스트, 색상 정보, 기호 등 피난안내 촉지도 제작에 불필요한 요소가 포함되어 있다. 이러한 요소들은 피난안내 촉지도 변환 시 불필요한 시각 요소와 시각장애인의 인식에 혼동을 일으킬 수 있다. 해당 요소들만 제거하기 위해선 피난평면도 내의 벽, 즉 건물의 벽체, 통로 등은 보호해야 한다. 피난안내 촉지도에선 도면 벽의 윤곽선만 공간의 경계 및 방 구조를 명확하게 전달하기에 이외에 모든 요소는 제거해야 한다. 제거하는 과정에서 벽 정보는 손상 없이 유지해야 한다. 본 절에서는 벽 보호 마스크를 활용하여 피난안내도의 불필요 요소를 제거하여 벽체만 남기는 방법을 제시한다.
먼저 도면의 벽체를 추출하기 위해 먼저 RGB 색상 정보에서 HSV 색 공간으로 변환했다. HSV 색 공간은 밝기와 색상 정보를 독립적으로 조절할 수 있다. 이를 활용하면 벽체와 같은 낮은 채도의 영역을 효과적으로 구분할 수 있다. 이는 색조(H), 채도(S), 명도(V)로 분해하여 표현하는 방식이다. 벽 정보는 일반적으로 매우 어둡거나 회색 범위에 근접한 색상 대역에 있음을 고려하여, HSV 채널 기준으로 어두운 범위 및 회색 계열 범위를 각각 식별하여 마스킹 처리한다. 이렇게 생성된 두 마스크를 논리합 연산으로 합성하여 도면 전체에서 벽 부분만을 단일 마스크로 추출할 수 있도록 구성했다. 이후 벽체 추출하는 과정에서 단절된 선이 있다면 연결될 수 있도록 보존 목적의 팽창 연산(dilate)을 적용하여 구조를 유지했다.
벽체 이외에 불필요한 영역의 색상 정보를 제거하기 위해, 비 벽체 영역의 색상 정보를 반복적으로 제거하였다. 해당 과정에선 앞서 생성하여 사용한 벽 보호 마스크를 기준으로 벽체 외부의 불필요한 색상 요소를 선택적으로 반복 제거하였다. 이를 위해 채도(S)와 명도(V)의 임곗값을 점진적으로 감소시켜 컬러 픽셀을 탐지하여 제거했다. 반복 횟수는 총 4회로 설정했으며, 점차 탐지 범위를 확장하였다. 초기 반복에서 채도와 명도의 값은 채도(S) 40, 명도(V) 50으로 비교적 낮은 기준을 적용해 빨간색, 파란색 등과 같이 비 확실한 색상 요소를 제거했다. 이후 반복 과정에서는 채도(S) 기준을 6씩 감소시켜 더 옅은 색상 요소까지 탐지하여 제거했다.
제거하는 과정에서 검출된 색상 정보가 벽체 마스크에 포함되지 않는 경우에만 제거하며, 해당 색상 정보는 흰색 픽셀(255, 255, 255)으로 치환되도록 하였다. 반복함으로써 초기에는 벽체 손상 없이 명확한 색상만 제거하고, 반복될수록 미세한 색상 잔여물 및 노이즈까지 안전하게 제거할 수 있다.
제거하는 부분에서 주변 노이즈도 완벽하게 제거하기 위해, 해당 제거 부분에 제거 목적의 팽창 연산을 추가로 적용했다. 팽창 연산을 적용하여 제거하는 부분이 주변에 있는 작은 노이즈나 외곽선이 완전히 제거되도록 했다.
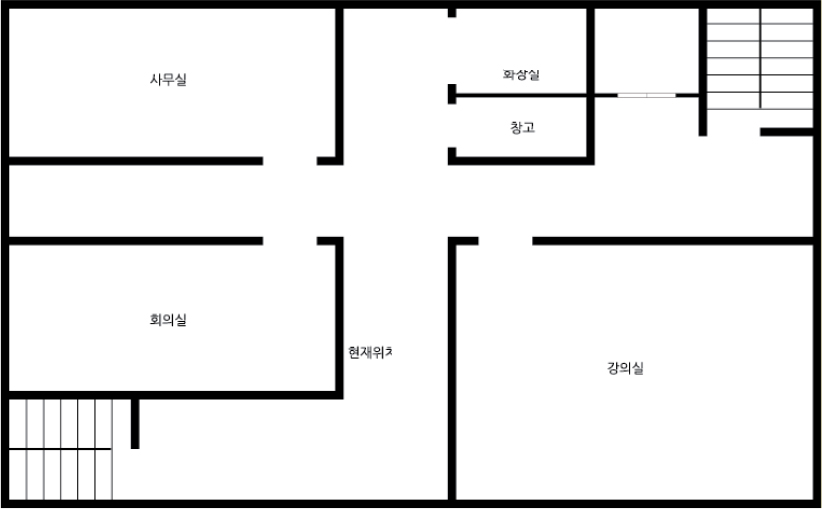
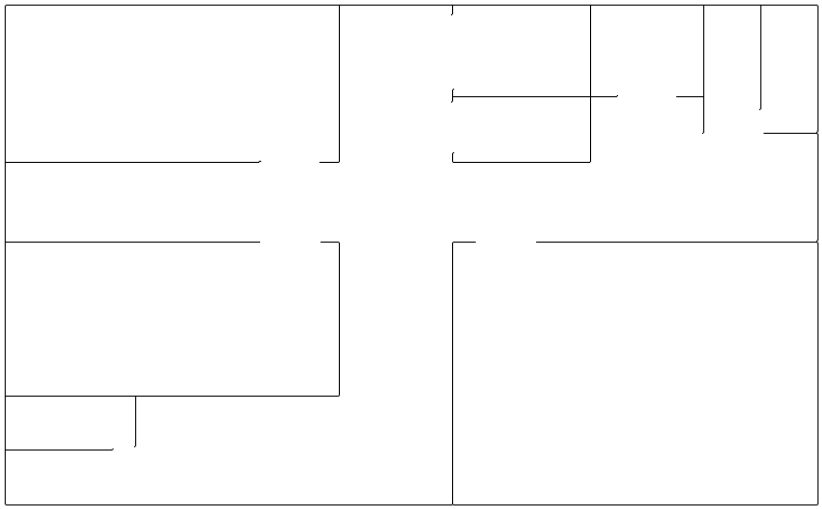
해당 과정들을 다 거치면 불필요한 요소(경로, 기호, 범례 등)를 제거할 수 있다. 그림 9는 불필요한 요소가 제거된 벽체와 텍스트만 남은 피난평면도이다.
2) 텍스트 제거
불필요한 요소 제거 단계에서 텍스트가 제거되지 않은 이유는 다음과 같다. 첫 번째, 대상 정보의 차이이다. 불필요한 요소 제거는 색상 기반 제거에 초점을 둔 전처리 과정이라 색상보다 형상(geometry)이 명확한 정보이므로 색상 정보만으로 제거가 어렵다. 두 번째, 처리 방식의 차이가 있다. 불필요 요소는 HSV 색상 임곗값과 팽창을 활용하여 색상 기반의 비 학습 기반 필터링 방식이다. 텍스트는 불필요 요소에 비해 색상 정보를 판별하기 어렵기에 구조적 특성을 기반으로 한 형태학적 필터링을 적용해야 한다. 이러한 이유로 텍스트 제거 과정은 불필요 요소 제거 단계와는 별도로 진행한다.
피난평면도 내부에 방 이름처럼 다양한 형태의 텍스트 정보가 포함되어 있으면, 점자 제작 시 시각장애인의 인식에 불편함과 혼동을 줄 수 있다. 또한, 텍스트는 도면 세선화에 인식되어 결과 품질에 영향을 줄 수 있다. 따라서 본 연구는 이진화 기반 텍스트 검출 및 제거 알고리즘을 적용하였다.
텍스트 제거 과정은 크게 네 단계로 구성된다. 첫 번째, 불필요 요소 제거가 완료된 도면 이미지를 그레이스케일(gray scale)로 변환한다. 이미지의 색상 정보 대신 명도 값만 이용하여 단순화하기 위해 그레이스케일을 진행한다.
두 번째, 변환된 이미지를 이용해 전역 이진화(binary thresholding)와 적응형 이진화(adaptive thresholding)를 각각 병행하였다. 전역 이진화는 전체 영상의 밝기 분포를 기준으로 200의 임곗값을 적용하여 해당 기준으로 밝은 배경과 어두운 선을 구분하는 데 사용했다. 적응형 이진화는 주변 픽셀의 국소 대비를 고려하여 계산하므로 조명 조건이 불균일하거나 도면에서 작은 문자 라벨을 안정적으로 구별할 수 있게 하였다. 두 결과를 비트 연산(bitwise)을 통해 결합하여 텍스트 특성을 포함하는 텍스트 마스크를 생성했다.
세 번째, 생성된 텍스트 마스크에 대하여 연결요소 분석을 수행하여 각 객체의 가로・세로 크기와 위치 정보를 파악한다. OpenCV 함수를 이용해 면적(area), 너비(width), 높이(height)를 측정했다. 경험적으로 문자 영역은 다른 객체보다 상대적으로 작고 좁은 형태를 보이기에 측정 조건의 기준은 다음과 같이 설정했다.
이 조건을 만족하는 객체는 텍스트로 간주하여 해당 객체는 제거 대상으로 지정한다. 제거된 부분은 흰색(255, 255, 255)으로 치환한다.
네 번째, 텍스트 마스크를 최종적으로 제거하기 위해 팽창(dilation) 연산을 두 번 진행했다. 이는 인식된 텍스트 픽셀 경계를 확장하여 작은 문자나 벌어진 라벨도 하나의 형태로 합쳐 제거하기 위함이다. 팽창에 사용된 커널 크기는 5×5 크기의 사각(kernel) 구조로 사용하였다. 단, 벽체 영역과 중첩되는 텍스트는 벽 마스크를 비트 반전시켜 텍스트 마스크와 교차시킴으로써, 피난평면도에서 구조 왜곡이 발생하지 않도록 예외 처리하여 보존하였다. 이러한 접근은 텍스트 정보를 효과적으로 제거하면서 피난평면도의 구조 형태를 손상하지 않는 결과를 제공한다.
이와 같은 텍스트 제거 모듈은 벽 마스크와의 보완적 결합으로 도면의 구조 정보를 훼손하지 않도록 하는 보수적인 자동 제거 모듈이다.
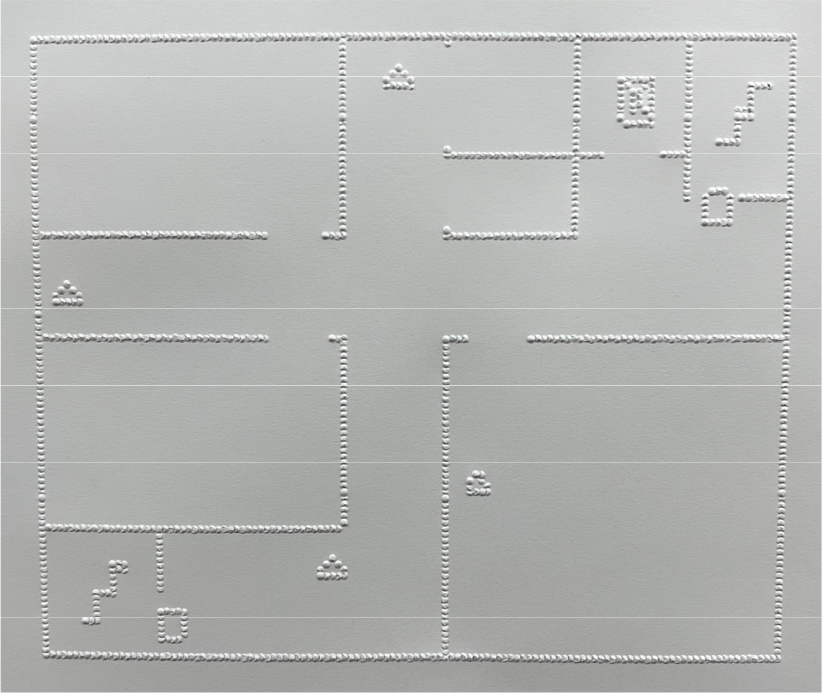
그림 10은 피난평면도의 윤곽선(벽체) 이외에 요소는 모두 제거된 것을 확인할 수 있다.
3) 세선화 및 선 굵기 통일의 일반화
건물의 외벽과 내벽과 같은 외곽 정보는 피난안내 촉지도의 가장 핵심적인 정보로, 이를 최대한 단순화하면서 구조적 형태를 유지하는 것이 중점이다. 기존 피난안내도를 피난안내 촉지도로 변환하여 점자프린터로 인쇄하기 위해선 도면의 윤곽선은 최대한 얇은 선을 유지해야 하며, 모든 선은 균일하게 처리되어야 한다. 또한, 자동 처리 과정에서 선의 끊김이 발생을 방지해야 한다. 얇고 균일하게 이루어지지 않으면 인쇄 시 윤곽선이 한 줄이 아닌 2줄 이상으로 출력되며, 균일하게 표현하지 않으면 윤곽선이 일정하게 표현되지 않는다. 또한, 자동 처리 과정에서 끊어진 윤곽선 및 노이즈를 보정 해주지 않으면 출력본이 깔끔해지지 않고 일반인이 보기에도 구조가 변형되어 출력되는 문제가 발생한다.
해당 문제를 보완하고 방지하기 위해 도면의 선 두께 일반화 및 세선화 작업을 진행한다.
세선화는 인식 대상을 기본 요소인 화소(Pixel)로 변환 후, 추출에 불필요한 화소를 제거하여 골격선의 두께를 1화소로 형성하는 작업이다(원남식・손윤구, 1995). 기존 허프 변환(Hough Transtorm) 기반 세선화는 직선 검출에 유리하지만, 곡선처럼 복잡한 영역은 손실이 발생한다. 때문에 허프 변환은 주요 세선화 과정에서 사용하지 않고 보조 수단으로 이용한다. 이에 곡선 및 복잡한 형태의 벽체를 안정적으로 보존하는 세선화 알고리즘을 구현했다.
먼저 전처리된 이미지를 흑백으로 즉 그레이스케일 변환하여 단순화한다. 그레이스케일 이미지는 후속 연산의 효율을 높이고 구조 정보 추출의 기반을 만든다. 이진화 연산에서는 픽셀 밝기 값의 임곗값을 기준으로 선분과 배경을 명확하게 분리한다.
앞선 과정에서 발생한 선의 미세한 단락 및 구조 단절을 보완하기 위해 모폴로지 클로징(Morphological closing)연산을 적용했다. 커널은 수평 방향 9×1, 수직 방향 1×9 형태를 사용하였으며, 연산을 두 방향 각각 적용한다. 해당 연산으로 직각 구조나 교차점이 많은 도면에서도 좁은 부위의 누락을 효과적으로 연결할 수 있다. 모폴로지 클로징 이후에는 비트 연산(bitwise operation)으로 결합하여 모든 방향의 세부 구조가 남을 수 있도록 하였다.
전처리된 이진 도면 이미지를 입력하여 형태학적 열림 연산(Morphological Opening)을 적용했다. 해당 연산은 세선화 과정에서 발생할 수 있는 작은 노이즈나 고립된 픽셀을 사전에 제거하여 세선화 알고리즘의 안정성을 높인다. 커널은 3×3 정사각 형태를 사용하여, 벽체의 왜곡을 방지하기 위해 최소 단위로 사용하였다.
앞 과정을 수행한 뒤, Zhang-Suen 알고리즘을 기반으로 세선화를 진행했다. 해당 알고리즘은 이진 이미지의 픽셀을 반복적으로 제거하여 객체의 중심선을 1픽셀 두께로 축소하는 방식이다(Zhang and Suen, 1984). 세선화에는 skeletoniz() 함수를 활용했으며, 남아있는 모든 실선 픽셀의 중심축만 남기는 추상화 기법이다.
scikit-image 라이브러리의 함수인 skeletonize( ) 함수를 이용하여 Zhang-Suen 방식으로 세선화를 진행했다. 세선화는 점자 인쇄에 최적화된 두께인 1픽셀로 일관되게 수행한다. 세선화 과정에서 발생한 윤곽선 손실을 보완하기 위해 폐쇄 연산(morphological closing)을 적용하여 미세한 도면 윤곽선의 단절부 및 틈을 복원하였다.
세선화가 완료된 후, 벽체의 연결이 단절되거나 일부 구조가 누락되는 현상을 보완하기 위해 Lee 알고리즘 기반 보조 세선화를 병행했다. 해당 방식은 곡선 중심선을 정밀하게 추출하는 특성이 있다. Lee 알고리즘 결과와 Zhang-Sune 알고리즘 결과를 논리적 OR 연산(bitwise_or)을 통해 결합하였으며, 이후 연결요소 분석을 진행했다. 연결요소 분석을 통해 추출된 면적(area) 중 면적이 3픽셀 이상인 영역으로 한정하였다. 이 과정으로 세선화 중 제거된 주요 연결선만 선택적으로 복원할 수 있다.
Lee 알고리즘 적용 이후에도 일부 직선 구간이 단절된 영역에 대해선 허프 변환(HoughLinesP) 연산을 사용하였다. 구조선에서 주된 직선만 검출하고, 각 라인을 1픽셀 두께로 명확하게 다시 그려주는 후처리 과정을 적용한다. 이때 파라미터는 표 5와 같이 설정하였다.
파라미터 수치는 다양한 도면 해상도 및 형태에 시도해본 결과 해당 수치를 도출하였다.
마지막 과정으로 연결 요소 기반 잡음 제거(Connected Component Filtering)를 진행했다. 면적이 2픽셀 미만인 고립된 점과 잔여 노이즈를 제거함으로써 결과 출력물의 질을 향상하였다.
그림 11은 세선화된 결과로 구조 왜곡을 보정하고, 출력을 위한 최적화 된 이미지이다.
5. 피난안내 촉지도 도면 생성
1) 촉지기호 배치
촉지기호 배치는 객체 탐지 단계에서 얻은 .txt 파일에 있는 정보와 세선화로 확보된 벽 마스크를 바탕으로 피난평면도에 배치하는 과정이다. 촉지기호의 크기 결정, 촉지기호 간 충돌 회피, 벽체 중첩 회피, 충돌 해소를 적용하여 자동화를 구성하였다. 본 연구에서는 피난 관련 시설(비상구, 소화기, 엘리베이터)의 바운딩 박스 좌표(x1, y1, x2, y2)를 바탕으로 각 시설 유형별 촉지기호를 도면에 적절한 위치에 자동으로 배치되도록 설계하였다.
먼저 촉지기호 크기 결정은 브레일(Braille) 격자 기반 촉지기호 배치 알고리즘을 구현했다. A4 규격(210×297mm)을 기준으로 입력 이미지의 해상도를 실측 크기(mm)로 환산하기 위해, 변환 계수를 산출하였다. 이때 이미지의 가로, 세로 해상도를 각 실측 길이로 나누어 최소 비율로 선택하고 실제 점자 인쇄 크기와 시각적 비율을 유지하도록 하였다.
점자 인쇄에 맞추어 촉지기호 크기를 결정하기 위해 점 간 간격 2.5mm, 셀 간 간격 6mm, 행간 간격 10mm를 기준으로 도면 위에 점자 그리드를 시각화하였다.
촉지기호의 크기는 점자 그리드 간격을 직접 참조하여 정의하였다, 비상구 촉지기호는 사각형 구조로, 폭 14mm, 높이 15mm로 구성하였다. 소화기는 이등변 삼각형 형태로, 밑변에 9.6mm, 높이 7.5mm 영역을 차지하도록 하였다. 엘리베이터 및 계단 피난안내도 규정 픽토그램으로 모양이 정해져 있기에 해당 규정에 맞추어 촉지기호를 사용하였다. 픽토그램이란 국가 간의 언어문화의 장벽을 없애고 원활한 의사소통을 가능하도록 돕는 그림 언어이다(강수진 등, 2008).
정사각형 구조를 기본으로 하되 내부에 대각선(X) 표시를 추가하였으며, 19×21mm크기로 설정하였다. 픽셀 단위로는 다음과 같이 변환된다.
해당 과정을 통해 모든 촉지기호는 점자 도트(dot) 간격을 기준으로 정규화된 비율로 배치된다.
촉지기호가 벽체나 다른 촉지기호와 겹치는 문제를 방지하기 위해 보호 마스크와 윤곽선 버퍼(Buffer)를 적용하였다. 보호 마스크는 벽체 영역을 팽창(dilate)하여 생성하고, 촉지기호가 벽체 경계에 근접하거나 겹칠 경우 자동으로 벽체에서 회피하도록 한다. 윤곽선 버퍼로는 동적 버퍼 함수를 통해 각 촉지기호 크기의 약 30%를 추가 여유 공간으로 설정하여 객체 크기에 비례하는 보호 범위를 설정하였다. 촉지기호의 실제 배치는 중심점 주변을 반경 8셀 범위에서 탐색하여 벽체나 윤곽선과 충동하지 않는 위치를 선정하였다.
피난안내도 도면에는 다양한 피난시설 기호가 있고, 해당 기호들이 서로 근접한 경우가 있다. 해당 부분을 고려하지 않고 객체 탐지로 추출된 좌표에 촉지기호를 바로 배치 한다면, 촉지기호가 겹치고 결과물 품질에 영향을 준다. 해당 문제점을 해결하기 위해 촉지기호 간 중복 제거 및 우선순위 배치를 적용하였다.
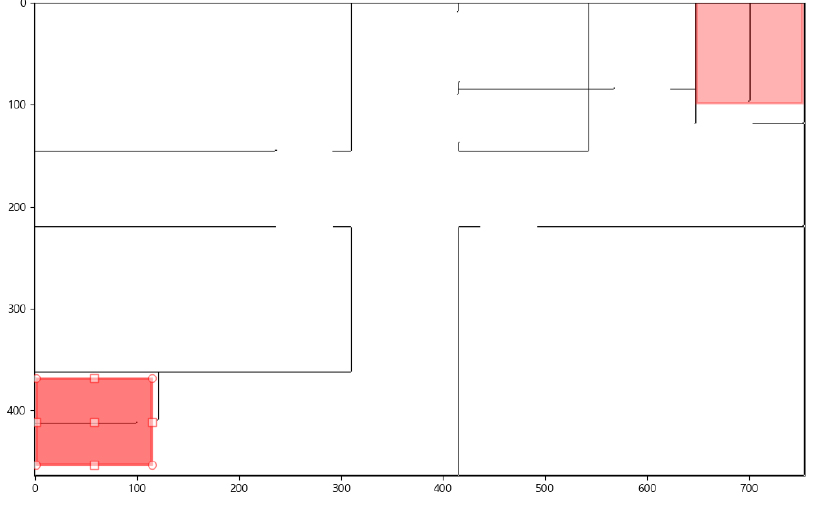
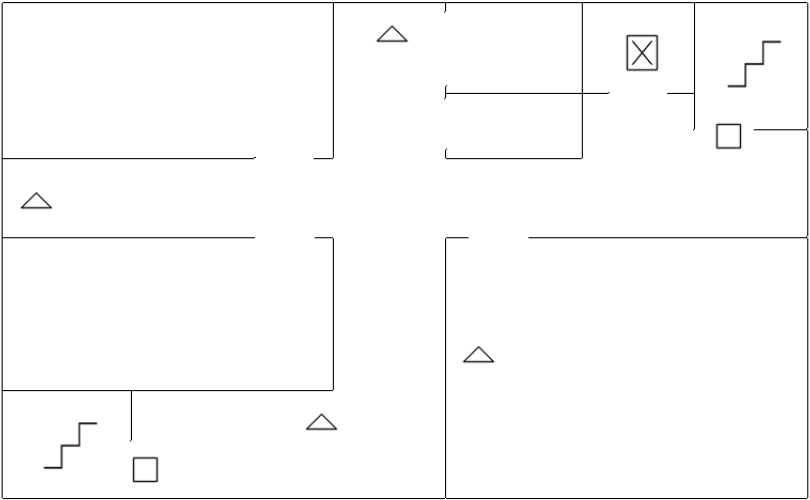
클래스별 중심 좌표 간 거리를 계산하여, 거리 임곗값 3 이하의 촉지기호는 동일 객체로 판단하고 제거하였다. 촉지기호 간 배치는 비상구 → 엘리베이터 → 소화기 순으로 수행된다. 촉지기호가 겹치거나 근접하면 우선순위가 높은 촉지기호를 고정하고, 동일 촉지기호일 경우 하나만 배치하고 다음 순위 촉지기호일 경우 조금 떨어진 위치에 재배치 된다. 하지만 계단 요소는 자동으로 제거되지 않아 해당 부분은 수동으로 제거해야 한다. 그림 9 이미지의 우측 상단과 좌측 하단과 같이 계단이 표현되는데, 이를 윤곽선(벽체)과 혼동 없이 지우기 위해 계단은 드래그로 수동 제거하도록 하였다. 그림 12와 같이 사용자가 직접 마우스로 계단 부분을 지정하면 해당 영역을 즉시 제거하고, 드래그 중앙부에 계단 촉지기호가 자동으로 배치될 수 있도록 하였다. 그림 12처럼 사용자가 드래그로 계단을 제거하면 그림 13의 이미지와 같이 자동으로 계단 및 비상구, 소화기, 엘리베이터 촉지기호가 배치된다.
6. 피난안내 촉지도 시범 인쇄
본 연구에서는 자동 생성된 피난안내 촉지도를 실제 점자 출력 프로그램(점사랑)에서 바로 사용할 수 있도록 이미지 최적화(Image Optimization) 과정을 추가하였다. 이 단계는 인쇄용 규격(A4, 300 DPI)을 기준으로 도면의 해상도, 배치 위치, 회전 방향을 자동 보정하였다.
우선 입력 이미지는 PIL(Python Imaging Library)을 활용하여 불러온 후, 점사랑 프로그램의 인쇄 방향 규칙에 맞추어 90도 회전을 수행하였다. 이후 출력 정확도를 확보하기 위해 밀리미터 단위의 실제 크기 정보를 픽셀 단위로 변환하였으며, 이때 변환 비율은 1인치당 25.4mm, 인쇄 해상도 300 DPI를 기준으로 계산하였다.
이미지 크기 및 위치 조정 과정에서는 점사랑 프로그램의 출력 결과를 반복적으로 비교 및 검증하여, 가장 안정적인 이미지 크기와 위치값을 도출하였다. 해당 수치를 출력 영역(width, height, x, y)에 mm 단위로 입력하면, 프로그램이 자동으로 이를 픽셀 단위로 변환하여 리사이징(Resizing) 및 정확한 위치 배치(Precise Placement)를 수행하였다. 변환된 이미지는 A4 규격(210 × 297mm)에 해당하는 캔버스 위에 흰색 배경으로 배치되며, 고품질 보간법(Bicubic Interpolation)을 적용하여 업스케일링 시에도 선명도를 유지하도록 하였다.
이와 같은 자동 보정 과정은 기존의 수작업 크기 조정 및 인쇄 위치 설정 과정을 대체하며, 출력용 파일이 점사랑 프로그램에서 왜곡 없이 불러올 수 있도록 한다. 결과적으로 사용자는 별도의 인쇄 설정 조정 없이 프로그램에서 바로 점자 인쇄를 수행할 수 있으며, 인쇄 품질의 일관성과 시각적 정확성이 확보할 수 있다.
그림 14는 이미지 최적화까지 완료한 도면을 점자 출력 프로그램(점사랑)과 점자프린터를 이용해 인쇄한 피난안내 촉지도를 나타낸 것이다.
IV. 결론
본 연구에서는 피난안내도를 시각장애인이 휴대하고 쉽게 제작해 사용할 수 있도록 하기 위해 피난안내 촉지도 제작 자동화 생성 기술을 제안하였다. 제안된 시스템은 OpenCV 기반 처리 기법과 YOLOv10 객체 탐지 모델을 결합하여, 기존의 수작업 중심 제작 절차를 자동화된 프로세스로 대체하였다.
우선 OpenCV를 활용하여 입력된 피난안내도 이미지에서 도면 외부의 불필요한 배경과 색상을 제거하고, 형태학적 연산을 통해 벽체 윤곽선을 보존한 채 피난평면도 영역만을 자동추출하였다. 해당 알고리즘은 「소방청 표준 피난안내도 작성기준」에 맞게 제작된 도면의 경우, 배경 복잡도와 관계없이 안정적으로 추출할 수 있도록 설계하였다.
전처리된 도면에서는 Zhang-Suen 기반 세선화 알고리즘을 적용하여 벽체 구조를 보존하면서 선의 굵기를 균일화하고, 점자 인쇄 시 선명도를 향상하였다.
또한, YOLOv10을 활용하여 비상구, 소화기, 엘리베이터 주요 피난 관련 시설을 자동으로 탐지하였다. YOLOv8과의 비교 실험 결과, YOLOv10은 특히 소형 객체 탐지에서 약 7% 이상 높은 정확도를 보였으며, 평균 정밀도 mAP@0.5는 89.8%의 성능을 확보하였다. 탐지된 객체의 좌표는 촉지기호 배치 알고리즘의 입력으로 사용되었으며, 각 클래스에 해당하는 촉지기호(비상구, 소화기, 엘리베이터)는 자동으로 배치되도록 하였다.
촉지기호의 크기는 실제 점자 점 간격(2.5mm)을 기준으로 하여 점자 그리드와 정렬되도록 설정하였다. 또한, 벽체와의 충돌을 방지하기 위해 보호 마스크를 설정하였으며, 촉지기호 간 충돌 시 자동으로 거리 기반 오프셋을 적용하여 인접한 방향으로 재배치하였다. 촉지기호가 중첩될 때는 비상구, 소화기, 엘리베이터 순의 우선순위를 부여하여 중복 배치를 최소화하였다.
이와 같은 자동화 과정을 통해, 비전문가 또한, 별도의 CAD 소프트웨어나 그래픽 지식 없이 피난안내도 이미지를 업로드하는 것만으로 5~10분 이내에 점자화된 피난안내 촉지도를 생성할 수 있다.
결과물은 점자프린터를 통해 즉시 인쇄할 수 있으며, 기존 수작업 방식 대비 제작 시간을 90% 이상 단축하고, 비용 부담 없이 누구나 무료로 활용할 수 있다. 또한, 해당 자동화 과정은 오픈소스 기반으로 개발되어 지속적인 업데이트와 확장을 할 수 있다는 점에서 유지 보수성 측면에서도 우수한 효율성을 지닌다.
본 연구의 결과는 촉지도 제작의 접근성과 효율성을 향상하고 학교, 병원, 공공기관 등에서 시각장애인의 독립적 이동권 보장 및 재난 대응 안전성 확보에 기여할 수 있다.
향후 연구에서는 시각장애인이 식별하기 위해 각 부분에 대한 안내가 있는 범례와 점자를 추가할 예정이며, 점자프린터와 직접 연동을 통해 도면 입력부터 피난안내 촉지도 인쇄까지 완전 자동화된 프로세스를 구현할 예정이다.
또한, 현재 반자동으로 제거가 필요한 계단 객체를 자동으로 인식・제거할 수 있도록 데이터셋을 확장하고 탐지 모델을 개선할 계획이다. 더 나아가, 다양한 피난 시설 및 비상 대응 아이콘을 추가 학습시켜 보다 정밀한 피난안내 촉지도 제작과 시각장애인의 사용성 평가 등을 통해서 보다 현실적인 피난안내 촉지도로 개선해 나갈 계획이다.
