

I. 서론
II. 학습데이터 구축
1. SAR Oil Spill Open Dataset
2. Speckle Noise Filtering
3. 학습 데이터 증강
III. 딥러닝 모델 학습
1. 딥러닝 세그먼테이션 모델
2. Optuna 기반 해상 유출유 탐지 딥러닝 모델 학습
IV. 유출유 탐지 딥러닝 모델 결과
1. 정량적 결과
2. 정성적 결과
V. 결론
I. 서론
해양공간에서의 해상운송, 여객, 어업, 관광 등의 활동과 활용이 증가함에 따라 해상 유출유 발생 위험이 더욱 증가하고 있다. 해양경찰청의 해양오염사고 상세데이터에 따르면 2020년∼2024년 5년간 발생된 해양오염사고 발생은 총 1,273건이며 1,734㎘가 유출된 것으로 나타났다. 이 중 1㎘ 이상의 유류 유출사고는 99건으로 연평균 약 20건의 대형사고가 꾸준히 발생되고 있다(공공데이터포털, 2025). 2007년 태안 유조선 침몰사건이나 2010년 멕시코만에서 발생한 해상의 대형 유류 유출사고는 빈도로 볼 때 아주 적을 수 있으나 발생되면 해양환경, 생태계, 수산업, 관광산업 등에 환산할 수 없는 막대한 피해를 유발한다. 이에 예방 뿐만이 아니라 해상의 유류 유출을 조기에 정확한 현황정보를 수집하고 신속한 방제를 통해 피해를 최소화하는 것이 매우 중요하다(김태호 et al., 2021; 강종구 et al., 2022).
최근 유출유를 정확하고 효율적으로 구분하기 위해 시인성이 높은 항공기 또는 UAV(Unmanned Aerial Vehicle) 등을 이용한 유출유 탐지모델링 연구(Aznar et al., 2014; Odonkor et al., 2019)가 진행되어 왔다. 하지만 이러한 장비들은 유출사고가 발생된 지역을 조사하기 위한 많은 시간과 비용이 소요되는 어려움이 따른다(Dong et al., 2025). 이에 반해 위성의 경우 광범위한 지역에 대해 효율적인 탐지 모니터링이 가능하며(Huang et al., 2022; Arslan et al., 2023; 강종구 et al., 2023), 최근 다수의 고해상도 위성들이 발사되어 시공간해상도가 더욱 정밀해지고 있다. 광학위성 영상도 유출유 탐지에 많이 활용되고 있지만(Hong et al., 2022; Schaeffer et al., 2022) 구름과 악천후에서의 활용에 제약이 존재하여 주로 SAR(Synthetic Aperture Radar) 위성영상을 활용한 연구들이 중점적으로 이루어져 왔다(Kim and Jung, 2017). 그러나 SAR 영상 역시도 무풍이나 저풍속, 내부파, 유기물 막(biogenic film) 등의 물리적 요인에 의해 해수면의 후방산란이 감소하여 dark spot이 발생되며, 이는 유출유와 구분을 어렵게 하여 오탐율(False Alarm Rate)을 증가시킨다(Solberg, 2012; Alpers et al., 2017). 또한 상대적으로 해상 유출유의 발생사례가 많지 않고 영상기반의 유출유 탐지에 고정된 규칙기반(rule-based)의 모델을 일반화하기에 어려움이 따른다(Zhang et al., 2025).
최근 수년간 딥러닝 기술기반의 영상 인식 기술은 비약적인 발전을 이뤄왔으며 이를 활용한 유출유 탐지 연구가 활발히 진행되고 있다. 특히 딥러닝 Semantic segmentation 기반의 모델은 SAR 영상의 복잡한 패턴에서도 효과적인 학습이 가능하며 전통적 임계값 기반의 탐지기법에 비해 자동화와 정확도 면에서 우수한 성능을 보여준다.
Krestenitis et al.(2019)은 SAR 영상을 통해 CNN 기반의 U-Net, DeepLab 등 6개 모델을 이용하여 이진분류 형태(oil spill, non-oil spill)가 가지는 한계를 극복하기 위해 선박, 육상 등의 라벨을 추가하여 유출유 탐지를 수행하였다. Zeng et al.(2020)은 OSCNet(Oil Spill Convolution Network) 모델을 개발하고 SAR 영상에 적용하여 기존 전통적 기계학습 기법과 비교를 통해 약 4%의 개선효과를 확인하였다.
기존의 유출유 탐지연구들에서는 CNN의 Semantic segmentation 기반 모델들이 주로 사용되었는데, CNN은 제한된 effective receptive field(ERF)로 학습 효율성이 떨어지고 소규모의 복잡한 환경패턴에서의 활용성이 떨어지므로 최근에는 영상기반 탐지분야에서는 이러한 부분에 강점을 가진 transformer 기반 연구로 전환되고 있는 추세이다(Xie et al., 2021). Kang et al. (2024)는 CNN 기반의 DeepLabV3+와 Transformer 기반의 Swin-UPerNet, Mask2Former를 이용해서 광학위성 PlanetScope의 유출유 탐지결과를 비교하여 Transformer 모델의 우수한 성능을 확인하였다. 하지만 복잡한 해양환경에서 다양한 유출유 패턴을 효과적으로 탐지하기 위해서는 transformer의 하이퍼파라미터의 최적화가 요구된다.
이에 본 연구에서는 선행연구 현황과 기술적 배경을 바탕으로 SAR 영상 기반의 해상 유출유 탐지를 위한 Transformer 기반 세그멘테이션 모델을 설계하고, 최적의 탐지 성능을 확보하기 위해서 Optuna 프레임워크를 활용한 하이퍼파라미터 자동 탐색 기법을 적용하여 활용 가능성을 평가하였다.
II. 학습데이터 구축
1. SAR Oil Spill Open Dataset
해상 유출유 사례 데이터가 상대적으로 부족한 한계를 보완하기 위해, 공개 SAR 데이터셋을 활용한 학습 자료를 구축하였다. 다음 공개 데이터셋들을 1차 후보로 검토하였다. 후보 목록과 세부 검토 항목은 아래 표 1과 같다.
표 1.
공개 SAR 데이터셋 별 특징
M4D 데이터셋은 다양한 클래스를 가지고 있으나 데이터셋이 1,112장으로 규모가 상대적으로 적었고, PANGAEA와 CSIRO는 데이터 개수가 충분하지만 일부 라벨링 자료가 바운딩 박스 및 칩(패치)로 어노테이션이 되어 있어 활용에 제약이 있다.
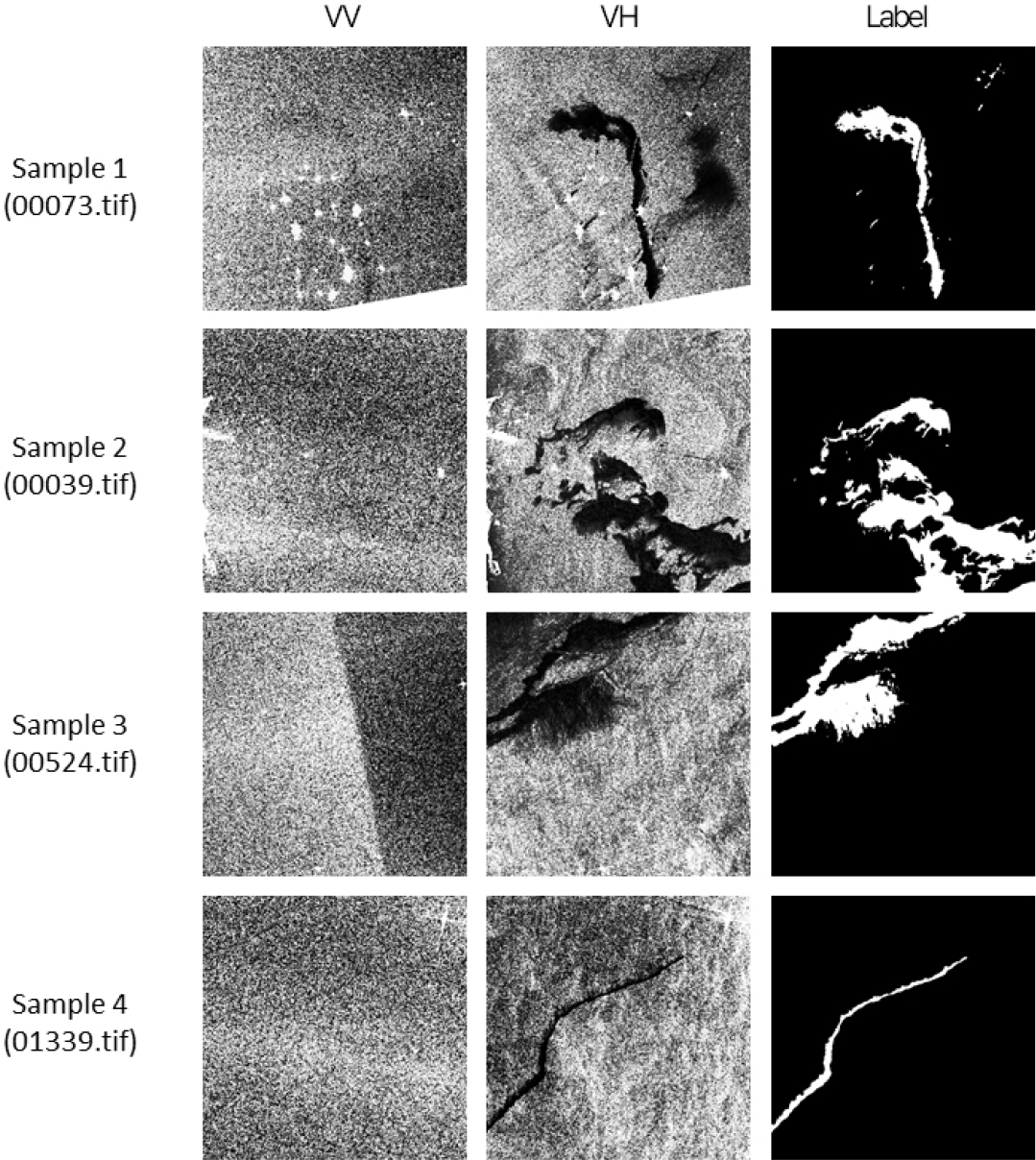
이에 후보로 검토된 여러 공개 유출유 데이터셋 중에서, Trujillo-Acatitla et al.(2024)의 데이터 생성 연구에서 신뢰성 검증이 수행된 Zenodo Sentinel-1 SAR Oil Spill Image Dataset을 최종 선정하였다. 본 데이터셋은 2048 × 2048 해상도의 GeoTIFF 형식 영상(채널: VV, VH) 과 픽셀 단위의 이진 마스크(Label) 를 함께 제공하여, 딥러닝 세그멘테이션 학습 파이프라인에 곧바로 적용할 수 있다. 또한, 단일 장면 내에 해양 배경, 선박 흔적, 유막 경계 등 충분한 공간적 맥락 정보를 포함하고 있어 모델의 학습 효율을 높일 수 있다. 데이터의 채널 스택 구성과 좌표계 정보가 명확하며, 별도의 복잡한 어노테이션 정제 과정이 필요하지 않아 활용 편의성이 높다. 표 2는 Zenodo 데이터셋의 주요 세부사항이며, 그림 1은 Zenodo 데이터셋의 예시 영상이다.
표 2.
Zenodo 데이터셋 세부 사항
| 특징 구분 | 세부사항 |
| 데이터 유형 |
이진 세그멘테이션 (Oil spill = 1, Background = 0) |
| 입력 밴드 | Sentinel-1 VV, VH |
| 영상 크기 | 2,048 × 2,048 px |
| 데이터 개수 | 1,200장 |
| 어노테이션 | 픽셀 단위 레이블 마스크 포함 |
| 파일 형식 | GeoTIFF(이미지 + 레이블) |
2. Speckle Noise Filtering
SAR 영상은 영상 형성 과정에서 발생하는 스펙클 노이즈(Speckle Noise) 로 인해, 동일한 해양 표면이라도 국소적으로 강도 변화가 크게 나타나는 특성을 가진다. 이러한 노이즈는 유막 경계 식별이나 미세한 질감 기반 탐지에 불리하게 작용하므로, 학습 데이터 구축 과정에서 적절한 필터링 절차가 필수적이다. 이 과정에서는 다양한 필터링 기법을 비교 검토하여 Refined Lee Filter를 주요 전처리 알고리즘으로 선정하였다. Refined Lee 필터는 Lee 필터의 지역 통계 기반 노이즈 억제 원리를 확장하여, 가장자리(edge)와 세부 구조(texture) 정보를 최대한 보존하면서 평균 강도 변동을 안정화시킨다.
Refined Lee 필터는 SAR 영상의 각 픽셀을 중심으로 설정된 국소 윈도우 내 통계치를 이용하여 노이즈를 감소시키는 적응형 평활(adaptive smoothing) 기법이다. 윈도우 내 평균과 분산을 이용해 픽셀 신호와 노이즈를 분리하고, 동질 영역에서는 강하게 평활을 수행하며, 경계 영역에서는 신호를 보존하도록 가중치를 조정한다. 영상의 동질성 정도에 따라 커널 크기(3×3~7×7)가 동적으로 변하며, 다채널(VV/VH) 영상의 동시 처리에도 적용 가능하다는 장점을 가진다. 이러한 방식은 단순 Lee, Kuan, Frost 필터 등에 비해 노이즈 억제와 구조 보존 간의 균형이 우수하며, 해양 표면 영상에서 유막 경계 식별력을 향상시키는 데 효과적이다.
본 과정에서는 Python 환경에서 Refined Lee Filter를 구현하여 SAR 영상의 스펙클 노이즈를 제거하였다. 필터는 각 영상 타일 단위로 적용되며, VV 및 VH 두 채널 모두에 동일하게 수행된다. 영상 입력은 GeoTIFF 형식으로 불러오며, 각 밴드를 부동소수점(float32) 형태로 변환하여 처리하였다. 필터의 핵심 연산은 윈도우 평균(mean filter)과 제곱평균(mean square filter)을 기반으로 한 지역 통계 계산이다. 각 윈도우(7×7 픽셀) 내에서 평균 및 분산을 계산하고, ENL(Equivalent Number of Looks) 값을 4로 하여 노이즈 분산을 추정하였다. 이를 이용해 지역 분산과 노이즈 분산의 비율을 기반으로 가중치 를 산출하였다. 최종적으로 픽셀 값은 다음과 같이 갱신된다.
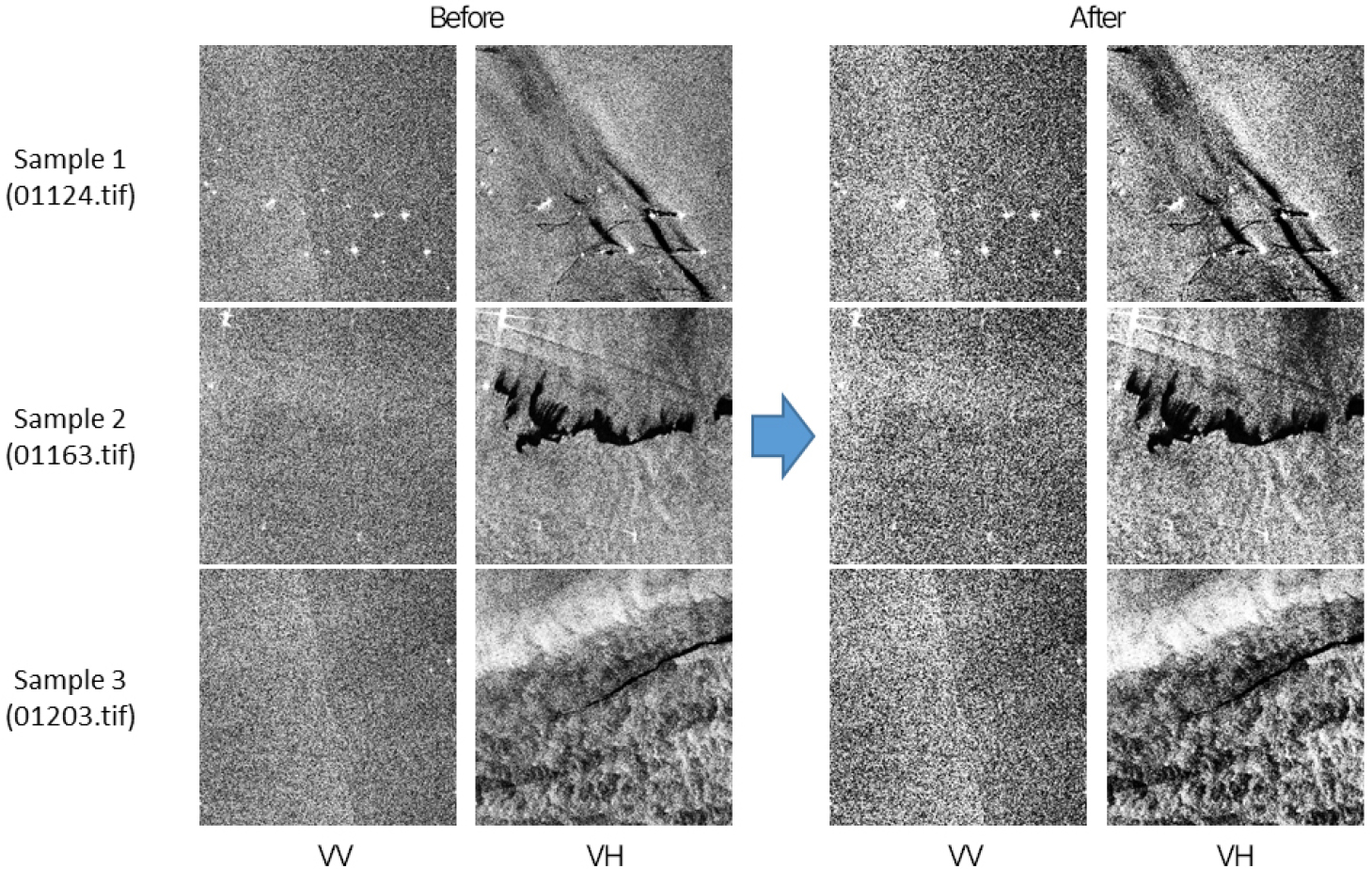
여기서 는 지역 평균, 는 원본 픽셀값이다. 필터링은 밴드 단위로 순차 처리되며, 출력 영상은 입력영상과 마찬가지로 float32 형식의 GeoTIFF로 저장하였다. 그림 2는 VV 및 VH 밴드에서 Refined Lee 필터 적용 전후의 변화를 시각적으로 나타낸 것이다.
3. 학습 데이터 증강
딥러닝 기반의 세그멘테이션 모델은 충분한 학습 데이터의 다양성을 확보할수록 일반화 성능이 향상되지만, 실제 유출유 SAR 영상의 표본 수는 제한적이다. 또한 유출유의 형태, 크기, 관측 각도, 풍속・해상 조건 등에 따라 영상 특성이 크게 달라지므로, 학습 과정에서 이러한 변동성을 모사할 수 있는 데이터 증강 과정이 필요하다.
이 과정에서는 학습 데이터의 다양성을 확보하기 위하여 Albumentations 기반의 증강 기법을 적용하였다. SAR 영상의 특성을 고려하여, 기하학적 변형 중심의 증강 전략을 채택하였으며, 화소 기반의 밝기 변환이나 인위적 노이즈 주입은 제외하였다. 구체적으로는 무작위 크기 변환(Random Resize), 자르기(Random Crop), 및 좌우 반전(Random Flip) 연산을 조합하여 영상의 공간적 변화를 모사하였다.
무작위 크기 변환(Random Resize)은 0.5배에서 2.0배의 비율(ratio range)로 영상의 스케일을 변동시켜 다양한 관측 거리와 유막 크기 변화를 반영하도록 하였다. 이어서 Random Crop 연산을 통해 512 × 512 크기의 학습 타일을 생성하였으며, 유막 픽셀 비율이 극단적으로 낮아지는 것을 방지하기 위해 cat_max_ratio를 0.75로 설정하였다. 마지막으로 Random Flip 연산을 확률 0.5로 적용하여 영상의 좌우 방향성을 무작위로 뒤집음으로써, 유막 분포 방향에 대한 모델의 편향을 줄였다.
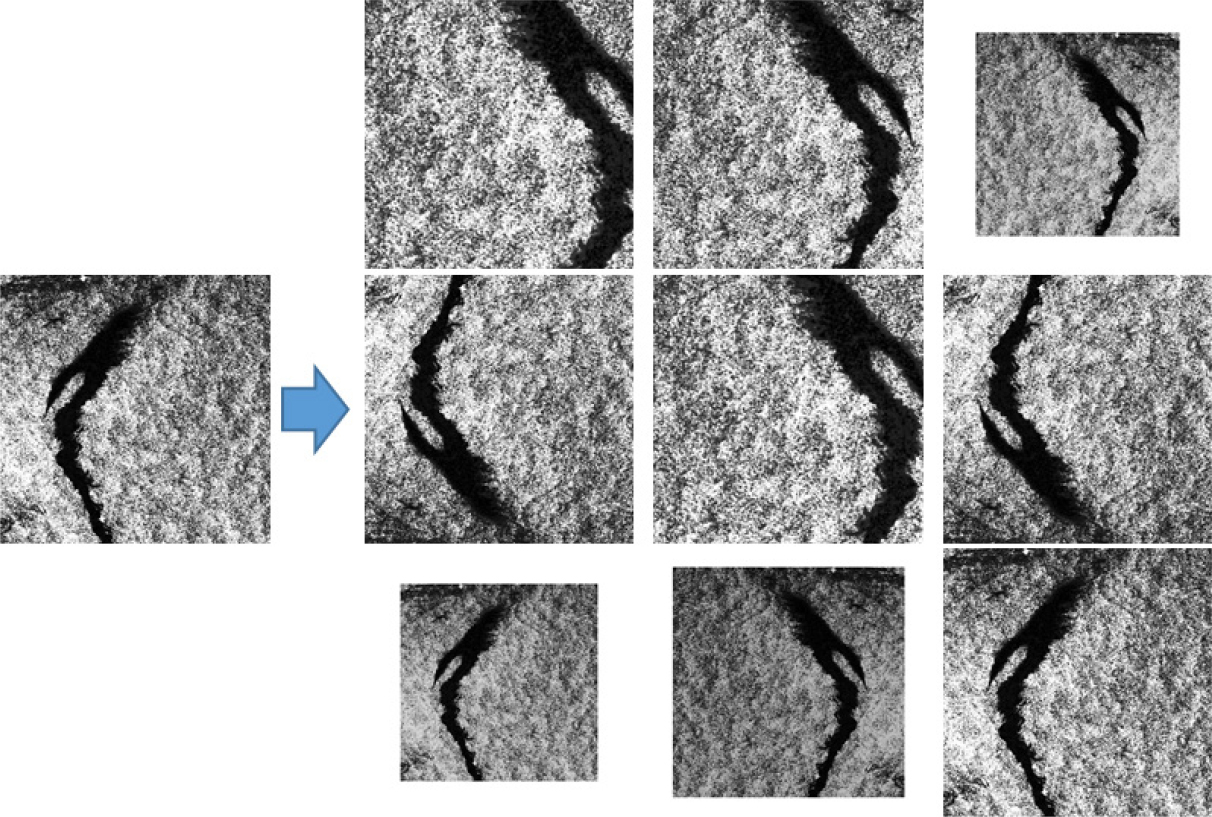
이러한 증강 기법들은 학습 과정에서 매 이터레이션(Iteration)마다 실시간으로 적용되어, 동일한 원본 영상이라도 반복 학습 중 서로 다른 형태로 변환된다. 이를 통해 모델은 다양한 관측 조건과 유막 형태에 노출되며, 데이터 양의 인위적 확대보다 더 높은 일반화 성능을 확보할 수 있다. 그림 3은 학습 데이터 증강 과정의 예시를 보여주며, 원본 영상에서 크기, 위치, 방향이 달라진 다양한 변형 결과를 확인할 수 있다.
추가로 본 과정에서는 제한된 학습데이터를 무작위 또는 단순 기하학적 변형을 통한 증강이 아니라 유의미한 증강을 위해 생성형 AI 기반 증강 기법의 적용 가능성을 실험하였다. 실험에서 Label-to-Image 방식의 SPADE(Spatially-Adaptive DeNormalization) 모델을 이용하여 유출유 라벨을 입력으로 SAR 영상(VV/VH 채널 쌍)을 합성을 수행하였다.
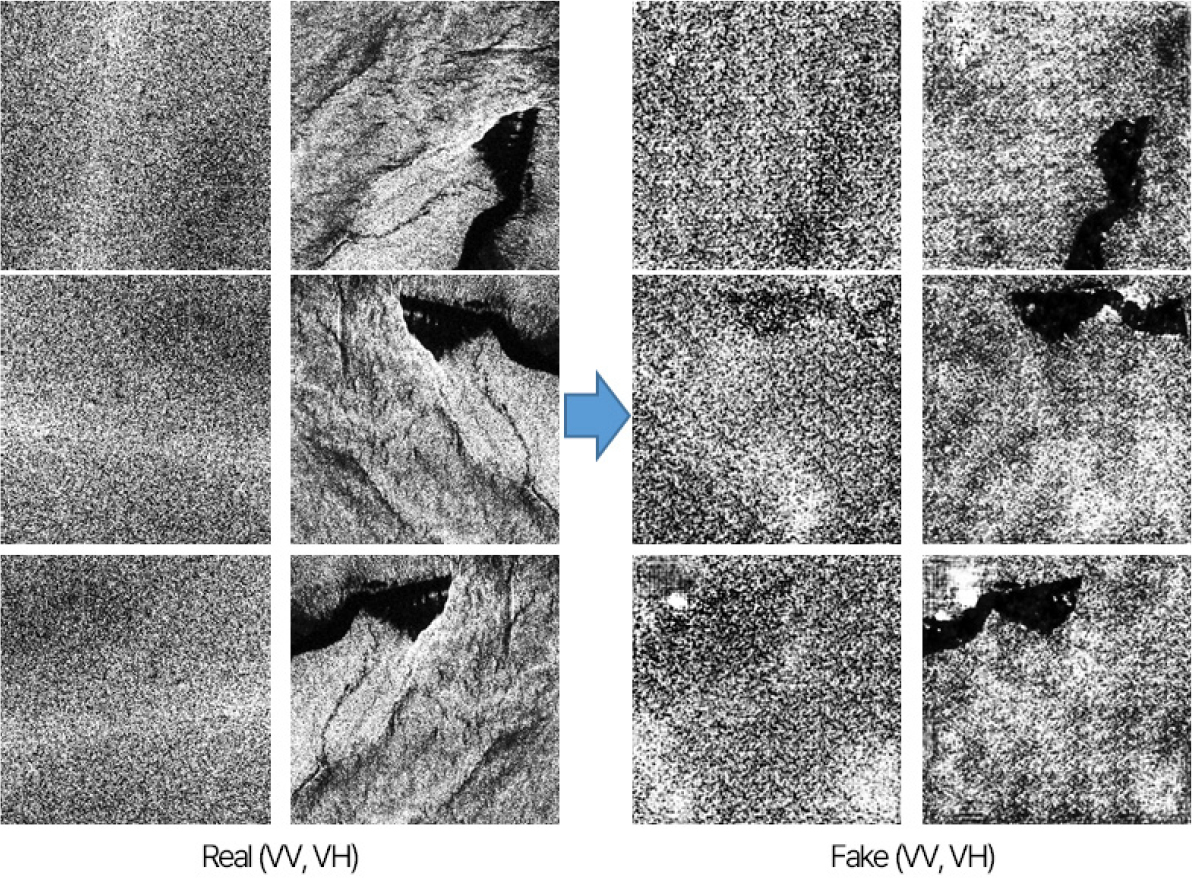
생성된 영상은 유출유의 대략적인 형태나 분포 패턴은 재현하였으나, 세부 질감과 강도 대비 특성은 실제 SAR 영상과 상이하였다. 특히, 해양 배경부의 스펙클 구조나 유막 경계의 미세한 질감 표현이 불안정하여, 현 단계에서는 학습용 데이터로 직접 활용하기에는 한계가 있다고 판단되어 이 과정에서는 생성형 증강 기법을 본격적인 데이터 생산 수단으로는 적용하지 않았다. 다만, 본 실험으로 연구의 기하학적 변형 중심의 증강기법에 대한 활용한 근거가 되었으며, 기술적 타당성과 향후 활용성에 대한 평가를 통해 잠재적 활용가능성과 문제점을 파악할 수 있었다. 향후에는 합성 SAR 영상의 물리적 신뢰성을 정량적으로 평가하고, 실제 학습 데이터와의 혼합 효과를 분석함으로써, 생성형 증강의 실질적 활용 가능성을 단계적으로 검토하는 과정이 필요할 것으로 판단된다.
그림 4는 SPADE 모델을 통해 생성된 VV/VH 채널의 SAR 합성 예시를 보여준다. 합성 영상은 실제 영상과 유사한 경향을 일부 보이지만, 세부 질감과 대비 특성에서는 여전히 개선이 필요한 수준으로 판단된다.
III. 딥러닝 모델 학습
1. 딥러닝 세그먼테이션 모델
SAR 영상 기반 유출유 탐지를 위해 딥러닝 세그멘테이션(Deep Learning Segmentation) 모델을 구축하였다. 본 모델은 Refined Lee 필터를 적용한 전처리 영상과 증강 데이터셋을 입력으로 사용하여, 유출유 영역(Oil Spill)과 배경(Sea Surface)을 픽셀 단위로 분류하도록 학습되었다. 모델은 인코더–디코더 구조를 기반으로 하며, 인코더에서 다단계 특징을 추출하고 디코더에서 공간 정보를 복원하여 최종적인 유막 분포 마스크를 생성한다.
백본(Backbone)으로는 Swin Transformer를 적용하였다. Swin Transformer는 윈도우 단위의 계층적 자기주의(Self-Attention) 구조를 채택하여, CNN의 지역적 특징 추출 능력과 Transformer의 전역적 문맥 표현 능력을 모두 확보할 수 있다. 이러한 구조는 SAR 영상에서 나타나는 스펙클 패턴, 선형 반사, 유막 경계 등 서로 다른 공간 규모의 특징을 효과적으로 포착하는 데 유리하다. 또한 계층적 피처맵 구성을 통해 고해상도 정보를 유지하면서 연산 효율성을 확보할 수 있다.
세그멘테이션 프레임워크는 Mask2Former(Masked-attention Mask Transformer) 를 적용하였다. Mask2Former는 쿼리 기반의 마스크 예측(Mask Query Prediction) 구조와 Transformer 디코더를 결합하여, 다양한 클래스의 객체를 일관된 구조에서 처리할 수 있는 범용 세그멘 테이션 모델이다(그림 5).
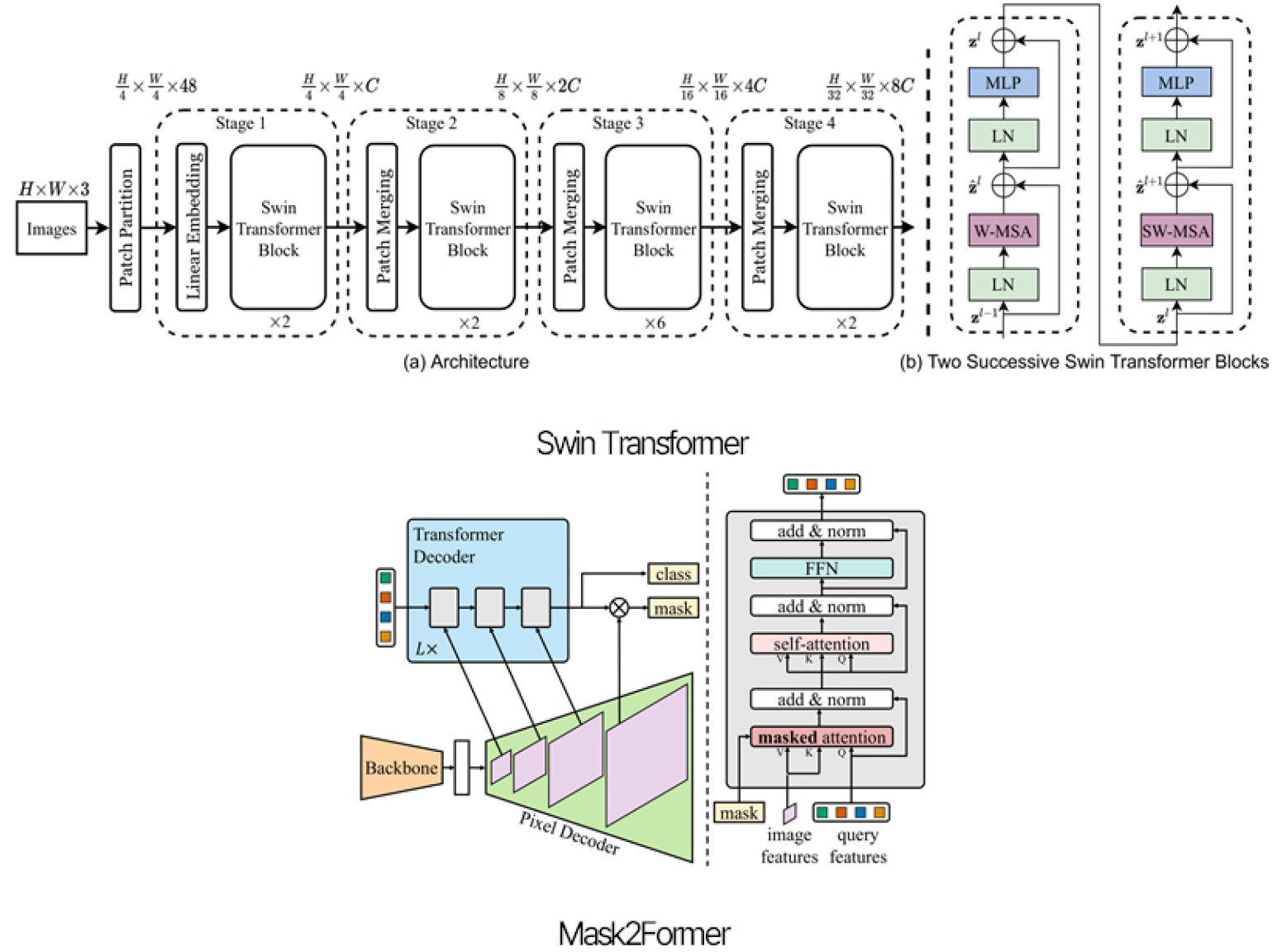
SAR 영상에 적용할 경우, 불규칙한 유막의 형태나 명암 대비 변화에도 유연하게 대응할 수 있으며, 세밀한 경계 복원에 강점을 가진다. Swin Transformer 백본과 결합된 Mask2Former는 SAR 영상의 전역적・지역적 특징을 함께 고려하여 유막 탐지 성능을 향상시키는 데 효과적이다.
2. Optuna 기반 해상 유출유 탐지 딥러닝 모델 학습
모델 학습 과정에서는 Optuna 프레임워크를 활용하여 주요 하이퍼파라미터의 최적 조합을 탐색하였다. Optuna는 파이썬(Python) 기반의 자동화된 하이퍼파라미터 최적화 라이브러리로, 코드 실행 중에 탐색 공간을 동적으로 정의하는 define-by-run 방식을 지원한다. 데이터셋은 Zenodo Sentinel-1 SAR Oil Spill Dataset에서 제공하는 공식 데이터 분할을 그대로 사용하였으며, Train 80%, Validation 10%, Test 10%의 비율로 구성하였다. 모든 영상은 Refined Lee 필터를 거쳐 정규화(mean, std 적용)되었으며, 학습 과정에서는 실시간 증강(Random Resize, Crop, Flip 등)이 적용되었다.
본 연구에서는 Optuna의 BaseSampler 구조를 이용하여 탐색을 수행하였다. BaseSampler는 두 가지 샘플링 전략인 relative sampling과 independent sampling을 조합하여 파라미터 값을 결정한다. Relative sampling은 여러 파라미터 간의 상관관계를 고려하여 동시에 값을 추정하며, independent sampling은 상호 독립적인 파라미터에 대해 개별적으로 값을 결정한다. 이러한 절차를 통해 각 실험(Trial)마다 효율적인 탐색 공간을 구성하고, 실험의 반복 과정에서 최적의 조합을 점진적으로 수렴시킨다. 탐색 대상 변수는 학습률(Learning rate), 배치 크기(Batch size), 드롭 경로 비율(Drop path rate), 가중 감쇠율(Weight decay), 배경 클래스 가중치(Background weight) 등으로 설정하였다. 각 변수의 탐색 범위와 최종 선택값은 표 3과 같다. 탐색은 GPU 환경에서 다중 Trial 구조로 수행되었으며, 각 Trial의 결과는 데이터베이스에 자동 기록되어 추적성과 재현성을 확보하였다.
표 3.
Optuna 기반 하이퍼파라미터 탐색 및 학습결과의 최적조합
Optuna 탐색은 총 5회 Trial로 수행되었으며, 각 Trial은 Validation IoU를 목적함수로 최대 50 에퍽(epoch)까지 학습하였다. 최종 성능 평가는 각 Trial에서 Validation IoU가 최고인 에퍽을 기준으로 수행하였으며, 이에 따라 실험별로 선택된 에퍽은 상이하다. 탐색은 RTX 3090 Ti 환경에서 수행되었고, 소요 시간은 실험 당 약 3시간이었다. 최적 조합은 Validation 세트의 IoU(Intersection over Union) 지표를 기준으로 선정되었으며, 학습률 0.000116, 배치 크기 2, Weight decay 0.014243, Background weight 0.87의 조합에서 최고 성능을 보였다.
IV. 유출유 탐지 딥러닝 모델 결과
1. 정량적 결과
유출유 탐지 모델의 최종 학습 결과를 정량적으로 평가하였다. 평가에는 공식 데이터 분할로샘플링된 Test 세트를 사용하였다. 평가는 픽셀 단위의 혼동행렬(confusion matrix) 기반으로 수행되으며, 예측영상의 TP(True Positive), FP(False Positive), FN(False Negative), TN(True Negative)에 대한 통계량을 계산하였다(표 4). 이 혼동행렬을 기반으로 Accuracy(정확도), Precision(정밀도), Recall(재현율), F1-score 그리고 영역 일치도를 의미하는 IoU(Intersection over Union) 지표를 산출하여 성능평가에 이용하였다.
표 4.
해상 유출유 탐지의 정확도 통계량
| 지표 | 의미 |
| TP (True Positive) | 실제 유출유를 올바르게 예측한 픽셀 수 |
| FP (False Positive) | 배경을 유출유로 잘못 예측한 픽셀 수 |
| FN (False Negative) | 유출유를 배경으로 잘못 예측한 픽셀 수 |
| TN (True Negative) | 배경을 올바르게 배경으로 예측한 픽셀 수 |
이진 세그멘테이션 문제에서는 배경 픽셀이 객체 픽셀보다 압도적으로 많아 Accuracy가 과대평가될 수 있다. 즉, 유출유 영역을 일부 놓치더라도 배경 픽셀을 올바르게 분류한 비율이 높으면 높은 Accuracy가 산출되므로, 해당 지표만으로 탐지 성능을 판단하는 데에는 한계가 있다. 따라서 본 연구에서는 배경 비중의 영향을 상대적으로 덜 받는 F1-score와 IoU를 주요 성능 지표로 해석하였다. F1-score는 과검출(FP)과 미검출(FN)을 동시에 고려하며, IoU는 예측 영역과 정답 영역 간의 공간적 일치도를 직접 반영하므로, 해양 영상과 같이 클래스 불균형이 큰 환경에서 세그멘테이션 성능을 보다 적절하게 평가할 수 있다.
Test 세트의 평가지표 계산 결과, Accuracy는 0.992, Precision은 0.909, Recall은 0.865, F1-score는 0.887, IoU는 0.797으로 나타나 비교적 높은 정확도로 평가된다(표 5).
표 5.
해상 유출유 탐지 딥러닝 모델의 정량적 성능평가 지표 및 결과
| 평가 지표 | 산출식 | 값 | 비고 |
| Accuracy | 0.992 | 전체 픽셀 중 정확히 분류된 비율 | |
| Precision | 0.909 | 예측된 유출유 중 실제 유출유의 비율 | |
| Recall | 0.865 | 실제 유출유 중 모델이 탐지한 비율 | |
| F1-score | 0.887 | Precision과 Recall의 조화 평균 | |
| IoU | 0.797 | 예측 마스크와 라벨 간의 겹침 비율(일치도) |
2. 정성적 결과
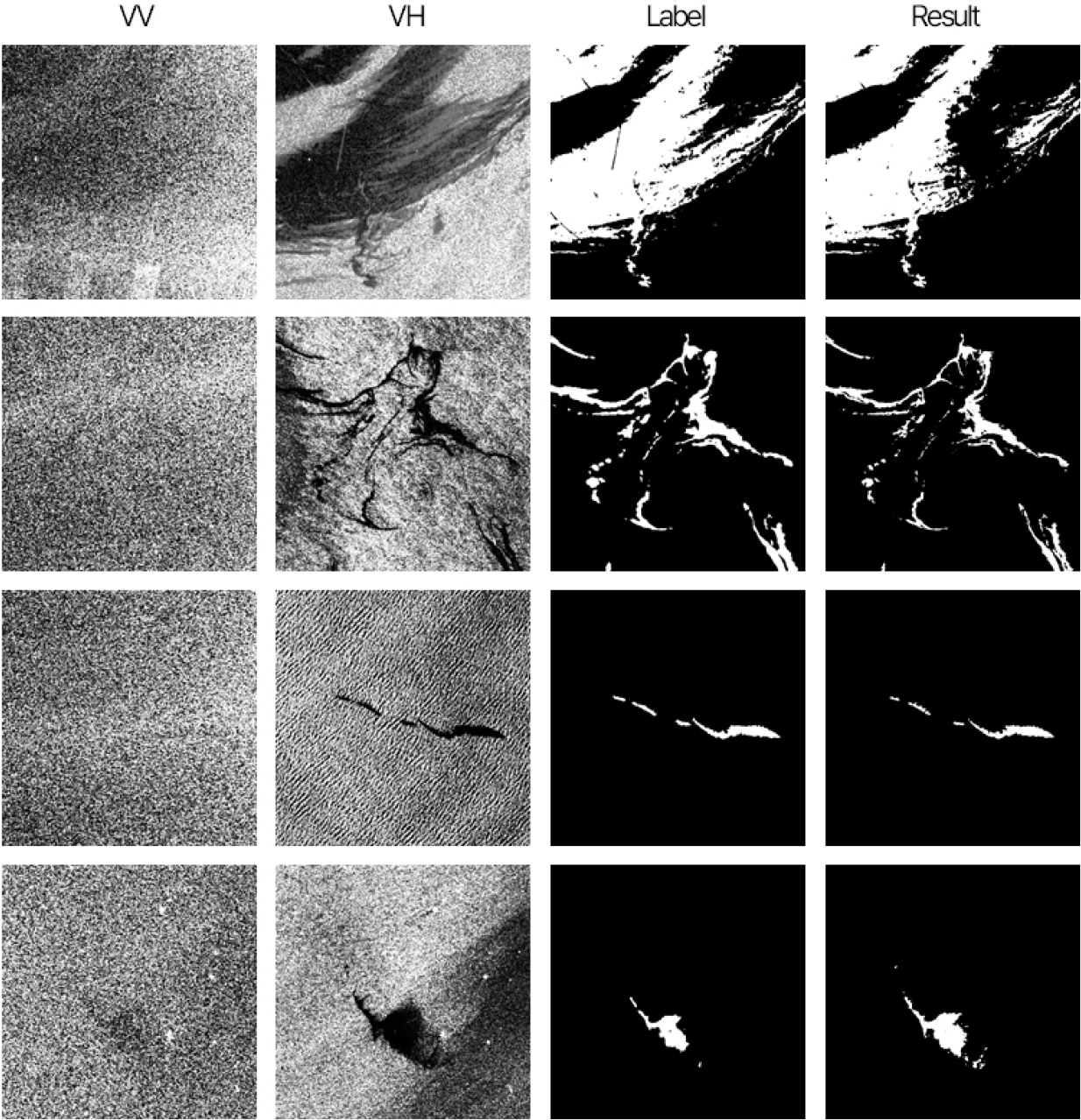
그림 6은 Test 세트 중 대표 장면에 대한 모델의 예측 결과를 보여준다. 왼쪽에서부터 VV 밴드, VH 밴드, 정답 라벨(Label), 모델 예측 결과(Predict)를 순서대로 나타낸 것이다. 모델은 유막의 전반적인 공간 분포와 경계 형태를 안정적으로 재현하였으며, 해양 표면의 스펙클 패턴이나 반사 강도 변화에도 불구하고 유출유 영역을 비교적 정확히 분리하였다. 특히 복잡한 유막 경계를 포함한 장면에서도 실제 라벨과 유사한 형태를 복원하여, Transformer 기반 구조의 전역적 문맥 인식 능력이 효과적으로 작동함을 확인하였다.
V. 결론
본 연구에서는 Sentinel-1으로 구축된 공개 SAR 영상 데이터셋을 활용하여 Transformer 기반의 세그멘테이션 모델을 구축하여 해상 유출유를 탐지하고 공식 데이터 분할을 통한 암맹평가로 객관적 성능을 평가하였다. 2,048 × 2,048 화소의 1,200장 학습자료에 대해 암맹평가로 성능을 평가한 결과, 정확도 0.992, 정밀도는 0.909, 재현율은 0.865, F1-score는 0.887, 일치도는 0.797 등의 비교적 높은 정확도를 보였다. 모델은 전반적인 공간 분포와 형태를 안정적으로 재현하고 복잡한 해양환경에서 발생되는 스펙클 패턴이나 반사 강도 변화에도 유출유를 비교적 정확하고 세밀하게 분리하였다. 유출유 사례가 많지 않아 학습자료는 여전히 한계로 남아있지만 향후 연구에서는 추가적인 딥러닝 모델을 추가 적용하고 다른 객체에 대한 라벨을 추가함으로써 연구를 확장해 나갈 수 있을 것으로 사료된다. 또한 본 연구에서 제시한 모델은 최종적으로 현업의 해양 방제시스템과 연계하여 작동되어야 할 것이며, 이를 위해서는 향후 처리시간, 모델의 경량화 및 최적화를 위한 추가 연구와 준실시간 운용에 대한 논의가 이루어져야 할 것이다.
